Полезные свойства протеинового коктейля
Светлана МарковаКрасота - как драгоценный камень: чем она проще, тем драгоценнее!16 мар. 2017 г. Белок является ключевым...
Рабочими характеристиками асинхронного двигателя называются зависимости коэффициента полезного действия η, коэффициента мощности , подводимой мощности , тока , момент на валу двигателя , скольжения S , частоты вращения от значения полезной мощности на валу двигателя при постоянном напряжении и частоте тока в сети (рис.6).
Зависимость представляет собой кривую, весьма слабо наклонную к оси абсцисс. Скоростная характеристика мало отличается по форме от механической характеристики двигателя: она может быть названа жесткой.
Зависимость . При установившемся режиме работы , где - полезный тормозной момент двигателя, а - момент х.х. Так как при изменении нагрузки в пределах от х.х. до ном. частота вращения асинхронных двигателей остается почти постоянной, то зависимость асинхронного двигателя почти прямолинейна; пересекает ось ординат в точке, соответствующей .
Коэффициент мощности .
Асинхронный двигатель так же, как и трансформатор, потребляет из сети отстающий ток. Поэтому энергетические процессы, происходящие в асинхронном двигателе, характеризуют двумя величинами: активной мощностью и реактивной мощностью Q I
Соотношение между и Q I
: ![]()
Коэффициент мощности асинхронного двигателя зависит от нагрузки на валу.
При х.х. машины, когда энергия расходуется только на покрытие небольших потерь в статоре и незначительных механических потерь, активная мощность дв.мала, а реактивная мощность велика, поскольку в машине при нормальном напряжении возбуждается вращающееся магнитное поле с максимальной величиной потока полюса. Поэтому при х.х. асинхронный двигатель имеет
![]()
С постепенным возрастанием нагрузки активная мощность увеличивается, а реактивная мощность практически остается постоянной, так как при неизменной амплитуде напряжения сети поток полюса основного поля сохраняет ту же величину, что и при х.х. Следовательно, с увеличением механической мощности двигателя его коэффициент мощности тоже возрастает. При нагрузке, близкой к номинальной достигает наибольшего значения (0,75-0,95). Однако, при дальнейшем увеличении тормозного момента на валу, сопровождающемся снижением частоты вращения ротора и существенным ростом токов в обмотках статора и ротора, коэффициент мощности снижается, что объясняется усилением полей рассеяния и более быстрым ростом реактивной мощности по сравнению о активной мощности.
Поддержание высокого коэффициента мощности приобретает важное значение для экономического электроснабжения предприятий. В частности, нельзя допускать длительных х.х. асинхронного двигателя: если на отдельных станках нет работы, то двигатель отключают от сети. Далее, необходимо следить за тем, чтобы мощность устройства, приводимого в действие асинхронным двигателем, незначительно отличалась от номинальной мощности двигателя. Если при длительной работе асинхронного двигателя его средняя мощность не превышает 45% номинальной, то такой электродвигатель заменяют соответствующим двигателем мощности.
В тех случаях, когда работа двигателя при полной нагрузке сочетается с его работой со значительной нагрузкой, при которой становиться недопустимо низким, применяют специальные меры, обеспечивающие повышение коэффициента мощности. Для этого во время работы асинхронного двигателя со значительной нагрузкой /например, Р 2 <0,5 Р 2Н / снижают фазные напряжения на его статорной обмотке. Тем самым поток полюса вращательного поля, а, следовательно, и реактивная мощность машины будут уменьшены. Наиболее просто это достигается в двигателях, допускающих пересоединение фаз обмотки статора с на Y и включаемых в сеть с линейным напряжением, равным номинальному фазному напряжению. Тогда при работе с нагрузкой, близкой к номинальной, фазы обмотки статора соед. , а при значительной недогрузке – Y . Это приводит к снижению фазного напряжения в . Это пересоединение фаз обмотки статора обычно производится при помощи автоматического устройства. Двигатель, снабженный таким устройством, работает в широком диапазоне изменения нагрузки с близким к номинальному.
К.п.д. асинхронного двигателя
![]()
P 1 =P 2 +ΔP потерь
Потери можно разделить на постоянные, практически не зависящие от нагрузки /потери стали сердечника статора, механические потери/, они определяются экспериментально из опыта х.х.; Переменные потери – потери на нагревание проводников статора и ротора
и добавочные потери.
К.П.Д. двигателя достигает своего максимального значения /65-95%/, когда переменные потери равны постоянным. У большинства двигателей этот максимум к.п.д. имеет место примерно при нагрузке, равной 75% от номинальной, так как двигатели проектируются с учетом того обстоятельства, что далеко не всегда они полностью загружены.
При подготовке к работе повторить теоретический материал: принцип действия и устройство трехфазного асинхронного двигателя; понятие о скольжении; электромагнитный момент асинхронного двигателя; зависимость момента от скольжения; перегрузочная способность асинхронного двигателя; рабочие характеристики трехфазного асинхронного двигателя.
Программа работы.
1. Изучить принцип действия, устройство и назначение основных конструктивных элементов асинхронного двигателя (АД) с короткозамкнутым ротором.
2. Ознакомиться со схемой испытания АД (рис.7) и со стендом лабораторной работы.
3. По паспортным данным вычислить момент, развиваемый двигателем, при номинальном режиме работы. Заполнить таблицу нижеприведенной форы.
4. Выполнить маркировку фаз статора АД, используя схемы рис.8 и рис.9.
5. Зная напряжение сети (U A =380В ), обосновать выбор схемы соединения обмоток статора при номинальном режиме работы двигателя.
6. Собрать выбранный вариант схемы. Осуществить пуск двигателя без нагрузки. Измерить пусковой ток и ток холостого хода. Вычислить кратность пускового тока при включении двигателя без нагрузки.
7. Снять данные и построить рабочие характеристики двигателя и механическую характеристику.
8. Составить отчет и сделать заключение о проделанной работе.
Появление термина «реактивная» мощность связано с необходимостью выделения мощности, потребляемой нагрузкой, составляющей, которая формирует электромагнитные поля и обеспечивает вращающий момент двигателя. Эта составляющая имеет место при индуктивном характере нагрузки. Например, при подключении электродвигателей. Практически вся бытовая нагрузка, не говоря о промышленном производстве, в той или иной степени имеет индуктивный характер.
В электрических цепях, когда нагрузка имеет активный (резистивный) характер, протекающий ток синфазен (не опережает и не запаздывает) от напряжения. Если нагрузка имеет индуктивный характер (двигатели, трансформаторы на холостом ходу), ток отстает от напряжения. Когда нагрузка имеет емкостной характер (конденсаторы), ток опережает напряжение.
Суммарный ток, потребляемый двигателем, определяется векторной суммой:
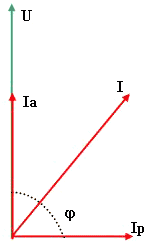
К этим токам привязаны мощности потребляемые двигателем.
Реактивная мощность не производит механической работы, хотя она и необходима для работы двигателя, поэтому ее необходимо получать на месте, чтобы не потреблять ее от энергоснабжающей организации. Тем самым мы снижаем нагрузку на провода и кабели, повышаем напряжение на клеммах двигателя, снижаем платежи за реактивную мощность, имеем возможность подключить дополнительные станки за счет снижения тока потребляемого с силового трансформатора.
Параметр определяющий потребление реактивной мощности называется Cos (φ)
Cos (φ) = P 1гарм / A 1гарм
A = √P² + Q²
Таким образом, сos (φ) уменьшается, когда потребление реактивной мощности нагрузкой увеличивается. Необходимо стремиться к повышению сos (φ), т.к. низкий сos (φ) несет следующие проблемы:
Из всего вышеприведенного, понятно, что компенсация реактивной мощности необходима. Чего легко можно достичь применением активных компенсирующих установок. Конденсаторы в которых будут компенсировать реактивную мощность двигателей.
Потребителями реактивной мощности , необходимой для создания магнитных полей, являются как отдельные звенья электропередачи (трансформаторы, линии, реакторы), так и такие электроприёмники, преобразующие электроэнергию в другой вид энергии которые по принципу своего действия используют магнитное поле (асинхронные двигатели, индукционные печи и т.п.). До 80-85% всей реактивной мощности, связанной с образованием магнитных полей, потребляют асинхронные двигатели и трансформаторы. Относительно небольшая часть в общем балансе реактивной мощности приходится на долю прочих её потребителей, например на индукционные печи, сварочные трансформаторы, преобразовательные установки, люминисцентное освещение и т.п.
Трансформатор как потребитель реактивной мощности . Трансформатор является одним из основных звеньев в передаче электроэнергии от электростанции до потребителя. В зависимости от расстояния между электростанцией и потребителем и от схемы передачи электроэнергии число ступеней трансформации лежит в пределах от двух до шести. Поэтому установленная трансформаторная мощность обычно в несколько раз превышает суммарную мощность генераторов энергосистемы. Каждый трансформатор сам является потребителем реактивной мощности. Реактивная мощность необходима для создания переменного магнитного потока, при помощи которого энергия из одной обмотки трансформатора передаётся в другую.
Асинхронный двигатель как потребитель реактивной мощности . Асинхронные двигатели наряду с активной мощностью потребляют до 60-65% всей реактивной мощности нагрузок энергосистемы. По принципу действия асинхронный двигатель подобен трансформатору. Как и в трансформаторе, энергия первичной обмотки двигателя – статора передаётся во вторичную – ротор посредствам магнитного поля.
Индукционные печи как потребители реактивной мощности . К крупным электроприемникам, требующим для своего действия большой реактивной мощности, прежде всего, относятся индукционные печи промышленной частоты для плавки металлов. По существу эти печи представляют собой мощные, но не совершенные с точки зрения трансформаторостроения трансформаторы, вторичной обмоткой которых является металл (садка), расплавляемый индуктированными в нём токами.
Преобразовательные установки , преобразующие переменный ток в постоянный при помощи выпрямителей, также относятся к крупным потребителям реактивной мощности. Выпрямительные установки нашли широкое применение в промышленности и на транспорте. Так, установки большей мощности с ртутными преобразователями используются для питания электроизоляционных ванн, например при производстве алюминия, каустической соды и др. Железнодорожный транспорт в нашей стране почти полностью электрифицирован, причём значительная часть железных дорог использует постоянный ток преобразовательных установок.
С другой стороны, элементы распределительной сети (линии электропередачи, повышающие и понижающие трансформаторы) в силу особенностей конструктивного исполнения имеют продольное индуктивное сопротивление. Поэтому, даже для нагрузки потребляющей только активную мощность, в начале распределительной сети будет иметь место индуктивная составляющая – реактивная мощность. Величина этой реактивной мощности зависит от индуктивного сопротивления распределительной сети и полностью расходуется на потери в элементах этой распределительной сети.
Действительно, для простейшей схемы:
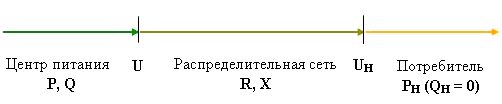
В результате, независимо от характера нагрузки, по распределительной сети от источника питания будет передаваться реактивная мощность Q. При двигательном характере нагрузки ситуация ухудшается – значения мощности в центре питания увеличивается и становится равными:
Р = Рн + (Рн² + Qн²) * R / Uн²;
Q = Qн + (Рн² + Qн²) * X / Uн².
Передаваемая от источника питания к потребителю реактивная мощность имеет следующие недостатки:
δР = (Рн² + Qн²) * R ,
Часть которых (а иногда и значительную) составляют потери от транспорта реактивной мощности.
Uн = U – (P * R + Q * X) / U.
Таким образом, транспортировка реактивной мощности по распределительным сетям от центров питания к потребителям превращается в сложную технико-экономическую проблему, затрагивающую как вопросы экономичности так и вопросы надежности систем электроснабжения.
Классическим решением данной проблемы в распределительных сетях является компенсация реактивной мощности у потребителя путём установки у него дополнительных источников реактивной мощности – потребительских статических конденсаторов.
Компенсация реактивной мощности применяется:
Из-за малого потребления активной мощности коэффициент мощности двигателя крайне низкий при холостом ходе или при малой нагрузке. Реактивный ток двигателя остается практически постоянным при всех нагрузках, так что на ряд ненагруженных двигателей приходится потребление реактивной мощности, которое лишь негативно сказывается на установке по причинам, описанным в предыдущих разделах.
Поэтому два хороших правила состоят в том, что ненагруженные двигатели следует отключать, а номинальные мощности двигателей не должны завышаться (поскольку это снизит их загрузку).
КБ должна подключаться непосредственно к зажимам двигателя.
После применения компенсации для двигателя ток блока «двигатель-конденсатор» станет меньше, чем до компенсации при том же режиме нагрузки двигателя. Это вызвано тем, что значительная часть реактивной составляющей тока двигателя подается от конденсатора, как показано на рис. L23 .
Если максимальная токовая защита двигателя расположена до соединения двигателя и конденсатора (это всегда так в случае подсоединения конденсаторов к зажимам), уставки реле защиты должны уменьшаться на отношение:
cos φ до компенсации/cos φ после компенсации
Для двигателей с компенсацией в соответствии со значениями квар, показанными на рис. L24 (максимальные значения, рекомендуемые для предотвращения самовозбуждения стандартных асинхронных двигателей, как обсуждается в подразделе Методы предотвращения самовозбуждения асинхронного двигателя), величины указанного выше отношения приведены для различных скоростей на рис. L25 .
Рис. L23: До компенсации трансформатор пропускает всю реактивную мощность, после компенсации конденсатор подает большую часть реактивной мощности
| Трехфазные двигатели, 230/400 В | |||||
|---|---|---|---|---|---|
| Номинальная мощность | Устанавливаемая мощность (квар) | ||||
| Скорость вращения (об/мин) | |||||
| кВт | л.с. | 3000 | 1500 | 1000 | 750 |
| 22 | 30 | 6 | 8 | 9 | 10 |
| 30 | 40 | 7,5 | 10 | 11 | 12,5 |
| 37 | 50 | 9 | 11 | 12,5 | 16 |
| 45 | 60 | 11 | 13 | 14 | 17 |
| 55 | 75 | 13 | 17 | 18 | 21 |
| 75 | 100 | 17 | 22 | 25 | 28 |
| 90 | 125 | 20 | 25 | 27 | 30 |
| 110 | 150 | 24 | 29 | 33 | 37 |
| 132 | 180 | 31 | 36 | 38 | 43 |
| 160 | 218 | 35 | 41 | 44 | 52 |
| 200 | 274 | 43 | 47 | 53 | 61 |
| 250 | 340 | 52 | 57 | 63 | 71 |
| 280 | 380 | 57 | 63 | 70 | 79 |
| 355 | 482 | 67 | 76 | 86 | 98 |
| 400 | 544 | 78 | 82 | 97 | 106 |
| 450 | 610 | 87 | 93 | 107 | 117 |
Рис. L24: Максимальное значение квар индивидуальной компенсации реактивной мощности без риска самовозбуждения двигателя
Двигатель с высокоинерционной нагрузкой будет продолжать вращаться (если специально не затормаживается) после отключения его питания.
«Магнитная инерция» цепи ротора означает создание ЭДС в обмотке статора на короткий период времени после отключения, которая уменьшиться до нуля через 1 или 2 периода в случае двигателя без компенсации.
Однако, подключенные конденсаторы создают трехфазную реактивную нагрузку для такой затухающей ЭДС, которая вызывает емкостные токи в обмотке статора. Такие токи в статоре создают вращающееся магнитное поле, которое действует точно по той же оси и в том же направлении, что и затухающее электромагнитное поле.
Как следствие, поток ротора увеличивается, токи статора увеличиваются, и напряжение на зажимах двигателя повышается иногда до опасно высокого уровня. Это явление известно как самовозбуждение и является одной из причин того, почему генераторы переменного тока, как правило, не работают при опережающих коэффициентах мощности, т.е. имеется тенденция к спонтанному (и неконтролируемому) самовозбуждению.
Примечания:
1. Характеристики двигателя, приводимого в движение инерцией нагрузки, не являются строго идентичными его характеристикам холостого хода. Однако, данное предположение является достаточно точным с практической точки зрения.
2. В двигателе, действующем в качестве генератора, циркулирующие токи являются в основном реактивными, так что эффект торможения (замедления) двигателя вызван главным образом только нагрузкой, представленной его охлаждающим вентилятором.
3. Ток (угол отставания почти 90°), потребляемый от источника питания ненагруженным двигателем в нормальных условиях, и ток (угол опережения почти 90°), подаваемый на конденсаторы двигателем, выступающим в качестве генератора, имеют одинаковое фазовое соотношение с напряжением на зажимах. Именно поэтому две характеристики могут налагаться на один график.
Для предотвращения самовозбуждения, как описывается выше, номинальная мощность (квар) блока конденсаторов должна ограничиваться следующим максимальным значением:
Где Io - ток холостого хода двигателя и Un - межфазное номинальное напряжение двигателя (кВ). На рис. L24 приводятся значения Qc, соответствующие данному критерию.
Пример:
Трехфазный двигатель, 75 кВт, 3000 об./мин, 400 В, может иметь блок конденсаторов не выше 17 квар согласно рис. L24. Табличные значения, как правило, слишком малы для соответствующей компенсации двигателя до нормально требуемого уровня cos φ. Однако, дополнительная компенсация может осуществляться, например, с помощью КБ централизованной компенсации, установленной на шинах ТП.
В любой установке с высокоинерционными нагрузками, приводимыми в действие двигателями, выключатели или контакторы, управляющие такими двигателями, должны быстро отключаться в случае полной потери электропитания.
Если не принять такой меры предосторожности, велика вероятность возникновения крайне высоких напряжений (из-за самовозбуждения), поскольку все другие КБ работают в сети параллельно с конденсаторами высокоинерционных двигателей.
Поэтому схема защиты таких двигателей должна содержать реле отключения по максимальному напряжению вместе с реле контроля обратной мощности (двигатель подает питание на остальное оборудование до рассеяния полученной инерциальной энергии).
Если мощность конденсаторов индивидуальной компенсации высокоинерционного двигателя, больше, чем рекомендованная на рис. L24, они должны управляться отдельно с помощью выключателя или контактора, который осуществляет отключение вместе с главным выключателем или контактором двигателя, как показано на рис. L26.
Включение главного контактора осуществляется после включения конденсаторов.
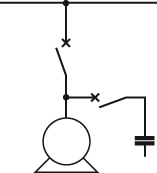
Рис. L26: Подсоединение блока конденсаторов к двигателю
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n 2 , η, полезного момента (момента на валу) М 2 , коэффициента мощности cos φ, и тока статора I 1 от полезной мощности Р 2 при U 1 = const f 1 = const.
Скоростная характеристика n 2 = f(P 2). Частота вращения ротора асинхронного двигателя n 2 = n 1 (1 — s).
Скольжение s = P э2 /P эм, то есть , а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Р э2 = 0, а поэтому s ≈ 0 и n 2 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = P э2 /P эм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n 2 = f(P 2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r 2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n 2 при колебаниях нагрузки Р 2 возрастают. Объясняется это тем, что с увеличением r 2′ возрастают электрические потери в роторе.
Зависимость М 2 = f(P 2). Зависимость полезного момента на валу асинхронного двигателя М 2 от полезной мощности Р 2 определяется выражением M 2 = Р 2 /ω 2 = 60 P 2 /(2πn 2) = 9,55Р 2 /n 2 , где Р 2 - полезная мощность, Вт; ω 2 = 2πf 2 /60 - угловая частота вращения ротора.
Из этого выражения следует, что если n 2 = const, то график М 2 = f 2 (Р 2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р 2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М 2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М 2 = f (P 2) имеет криволинейный вид.
Зависимость cos φ 1 = f (P 2). В связи с тем что ток статора I 1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I 0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I 1 ≈ I 0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ 1 ≈ φ 0), лишь немногим меньше 90°.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I 1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ 1 что объясняется возрастанием ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном . Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ 1 , целесообразно подводимое к двигателю напряжение U 1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора , это можно сделать пересоединив обмотки статора в , что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.

Светлана МарковаКрасота - как драгоценный камень: чем она проще, тем драгоценнее!16 мар. 2017 г. Белок является ключевым...

Гормоном, который сигнализирует головному мозгу о том, что организм нуждается в пище, является грелин: чем большее...

О пользе рыбы даже говорить не приходится, о ней уже давно все знают. Однако не все любят отварную, жареную рыбу или уху....

Как приготовить блины из патиссонов рецепты приготовления с фото - полное описание приготовления, чтобы блюдо получилось...

Хлебцы, на мой взгляд, — один из важнейших рецептов в меню сыроеда и в летний период, и зимой. Это основа, входящая в...

И я снова от души благодарю читательницу Александру, из-за комментариев которой на блоге уже появился замечательный , а...

Современный cовмещенный сонник Видеть за окном снегиря - является знаком хороших вестей, получения письма от...

По мишени: может означать фокусировку силы на определенной цели.Тщательно присмотритесь к своим жизненным...

КОНСПЕКТ УРОКА ОКРУЖАЮЩЕГО МИРА ДЛЯ 3 КЛАССА. УМК «Школа России» Тема: Воздух и его охрана. Цель...

Краткое описание карты: На рисунке мы видим, как шестеро атакуют одного, но у него есть явное преимущество: он...
Презентация «Безопасная дорога - детям» Актуальность Необходимость обучения детей ПДД, так как дети часто...

Рыбы, не сближайтесь с людьми, которые постоянно осыпают вас комплиментами — возможно, они втираются в доверие...

Отвечает Мария Бунеева, Эксперт Немецкого детского онлайн-университета В европейской католической традиции...

← 1132 - 1471 Столица Киев Язык(и) Древнерусский Религия Православное христианство Население восточные...

Гормоном, который сигнализирует головному мозгу о том, что организм нуждается в пище, является грелин: чем...

О пользе рыбы даже говорить не приходится, о ней уже давно все знают. Однако не все любят отварную, жареную...