Сонник крупа, к чему снится крупа видеть во сне, толкование сна крупа
Если во сне Вы просыпали на пол крупу, то Вас ждут потери. Для беременной женщины такой сон может быть предупреждением о...
Самыми распространенными электродвигателями в мире, безусловно, являются асинхронные двигатели. С целью унификации, как российские, так и зарубежные стандарты регламентируют характеристики этих популярных электродвигателей. Нормативные документы определяют и конструктивные исполнения асинхронных электродвигателей по способу монтажа, иными словами – способы крепления. Не всегда на шильдике электродвигателя указывается обозначение монтажного исполнения, так как многие современные асинхронные электродвигатели собираются из унифицированных конструктивных элементов по принципу конструктора LEGO. Производитель элементов электродвигателя просто не может знать, в какой конструктивной схеме у конечного заказчика будет использован корпус со статором, на котором обычно устанавливается шильд. Поэтому, при закупке асинхронных электродвигателей у пользователей часто возникает проблема определения конструктивного исполнения.
Как определить способ крепления асинхронного электродвигателя по его внешнему виду?
Существует различные нормативные документы, определяющие конструктивное исполнение двигателей. В этих стандартах можно видеть примерно такие таблицы:
Но основных, можно сказать базовых, конструктивных исполнений всего три – IMB3 (лапы), IMB5 (большой фланец), IMB14 (малый фланец), а также две их комбинации IMB35 (лапы и большой фланец), IMB34 (лапы и малый фланец).

Лапами называют кронштейны, установленные с одной стороны электродвигателя, образующие плоскую опорную поверхность и имеющие крепежные отверстия для фиксации электродвигателя. Лапы могут быть как литыми, то есть быть частью корпуса, так и съемными. Съемные лапы повышают универсальность двигателя, так как могут быть установлены с любой стороны, таким образом клеммная коробка может находиться не только сверху, но и с боку.

Асинхронные электродвигатели на лапах используются в тех механизмах, где нагрузка контактирует с двигателем только через вал с использованием муфт или ременной передачи.

Фланец электродвигателя – это плоская круглая опорная поверхность электродвигатели со стороны вала, на которой по радиусу расположены крепежные отверстия. Большой фланец имеет диаметр Р больше диаметра (ширины) корпуса электродвигателя АС. На фланце по радиусу расположены сквозные крепежные отверстия S без резьбы. Также, на фланце имеется круглый центрирующий выступ для правильной ориентации двигателя в конечном устройстве.

Большой фланец позволяет закреплять монтируемый электродвигатель со стороны корпуса – в этом основное назначение такого вида крепления. Благодаря наличию центрирующего выступа, крепление с помощью большого фланца используется в тех механизмах, где требуется повышенная точность взаимного ориентирования двигатели и нагрузки.

Малый фланец электродвигателя – это тоже плоская круглая опорная поверхность электродвигатели со стороны вала, на которой по радиусу расположены крепежные отверстия. У малого фланца, в отличии от большого, диаметр Р меньше, либо равен диаметру (ширине) корпуса электродвигателя АС. На малом фланце по радиусу расположены резьбовые крепежные отверстия S, и аналогично большому, на малом фланце есть круглый центрирующий выступ.

Малый фланец позволяет закреплять монтируемый электродвигатель со стороны конечного устройства, в которое устанавливается двигатель. Центрирующий выступ обеспечивает повышенную точность взаимного положения двигатели и нагрузки.

Очевидно, что комбинированное исполнение – это конструктивное исполнение, включающие в себя фланец и лапы.

Комбинированные исполнения часто используются в небольших насосах и промышленных вентиляторах. Для комбинированных исполнений характерно крепление корпуса нагрузки к двигателю посредством фланца, а двигатель, в свою очередь, крепиться к опорной поверхности с помощью лап. То есть, корпус двигателя становиться несущей конструкцией всего агрегата. Также, комбинированные крепления используются там, где требуется повышенная жесткость и прочность конструкции, так как лапы и фланец обеспечивают двойное крепление.
Пространственное положение электродвигателей
Другие конструктивные исполнения электродвигателей отличаются от IMB3, IMB5, IMB14, IMB35 и IMB34 только пространственным положением двигателя. Например, IMV6 – это электродвигатель на лапах, но опорная поверхность и ось вала двигателя располагается вертикально. В IMB6 опорная поверхность вертикальная, а ось расположена горизонтально. Небольшие электродвигатели можно устанавливать в любом пространственном положении.
Электродвигатели же большой мощности произвольно ориентировать в пространстве нельзя. Например, если предназначенный для горизонтальной установки двигатель большой мощности монтировать с вертикальной ориентацией вала, то из-за значительного веса ротора и осевой нагрузки могут быть повреждены подшипники. Поэтому, для двигателя вертикальной ориентации могут потребоваться усиленные подшипники. Также, у мощных электродвигателей не используют конструктивное исполнение с малым фланцем, так как резьба во фланце может не выдержать большой вес двигателя. При заказе мощных электродвигателей необходимо оговаривать пространственную ориентацию двигателя и конструктивную схему исполнения.
Конструктивное исполнение электродвигателя – это расположение составных частей машины относительно элементов крепления (подшипников и конца вала).– это пространственное положение машины на месте установки.
Структура условного обозначения конструктивного исполнения и способа монтажа двигателей установлена ГОСТ 2479–79. Условное обозначение состоит из латинских букв IM (International Mounting, по Публикации МЭК 34–7–72) или М (для конструктивных исполнений, не оговоренных в Публикации МЭК 34–7–72, но установленных ГОСТ 2479–79) и следующих за ними четырех цифр.
Характеристические цифры условно обозначают:
конструктивное исполнение (одна цифра – 1–я);
способ монтажа и направление конца вала (две цифры: 2–я и 3–я);
количество и исполнение концов валов (одна цифра – 4–я).
Применяются следующие условные обозначения конструктивных исполнений электродвигателей (1–я цифра):
| 1 | электродвигатель на лапах с подшипниковыми щитами; с пристроенным редуктором; |
| 2 | электродвигатель на лапах с подшипниковыми щитами, с фланцем на подшипниковом щите (или щитах); |
| 3 | электродвигатель без лап с подшипниковыми щитами, с фланцем на одном подшипниковом щите (или щитах); с цокольным фланцем; |
| 4 | электродвигатель без лап с подшипниковыми щитами, с фланцем на станине; |
| 5 | электродвигатель без подшипниковых щитов; |
| 6 | электродвигатель на лапах с подшипниковыми щитами и со стояковыми подшипниками; |
| 7 | электродвигатель на лапах со стояковыми подшипниками (без подшипниковых щитов); |
| 8 | электродвигатель с вертикальным валом, кроме машин групп от IM1 до IM4; |
| 9 | электродвигатель специального исполнения по способу монтажа. |
Способ монтажа электродвигателя – это 2-я цифра (значения от 0 до 7). Направление конца вала – 3-я цифра (значения от 0 до 9). Обозначения установлены в соответствии с ГОСТ 2479 для каждой из групп электрических машин от IM1 до IM9 и отражает пространственное положение корпуса и вала машины и конструктивные особенности крепления корпуса.
Например, цифра 0 в обозначении способа монтажа группы IM1 (исполнение IM10) характеризует электродвигатель с двумя подшипниковыми щитами на лапах, цифра 1 (исполнение IM11) – то же на приподнятых лапах и т.д. У машин на приподнятых лапах высота оси вращения может быть равна нулю или иметь отрицательное значение, т. е. плоскость лап может находиться на уровне осевой линии или выше ее.
При наличии пристроенного редуктора его выходной вал может быть параллельным (исполнение IM16) или перпендикулярным (исполнение IM17) оси вала машины, что также отражается второй цифрой обозначения электродвигателя.
Электрические машины на лапах и с фланцем (первая цифра 2 – исполнение IM2) имеют два типа фланцев: фланец большого диаметра, доступный с обратной стороны, с крепящими отверстиями без резьбы (вторая цифра 0 – исполнение IM20,) и фланец малого диаметра, недоступный с обратной стороны, с крепящими отверстиями с резьбой (вторая цифра 1 – исполнение IM21).
Цифра 8 в обозначении направления конца вала означает, что машина может работать при любом направлении конца вала; цифра 9 указывает на направление конца вала, не определенного цифрами от 0 до 8. Направление конца вала в этом случае указывают в технической документации.
Условные обозначения исполнений концов вала электрических машин (4–я цифра):
Под концом вала понимают часть вала, выступающую за внешний подшипник.
IM1081 – машина на лапах с двумя подшипниковыми щитами, с одним цилиндрическим концом вала, может работать при любом направлении конца вала.
Конструктивное исполнение электрическиких машин по способу монтажа (крепление и сочленение) и условное обозначение этих исполнений в технической документации установлены ГОСТ 2479-79.
Условное обозначение состоит из двух букв латинского алфавита IM и
четырех цифр: IM
Х Х Х Х
Для конструктивных исполнений, предусмотренных ГОСТ 2479-79, но не
входящих в СТ СЭВ 246-76 и публикацию МЭК 34-7, установлено условное
обозначение одной буквой М и теми же цифрами.
Стандарт устанавливает следующие условные обозначения. Первая цифра
- конструктивное исполнение:
1 - на лапах с подшипниковыми щитами;
2 - на лапах с подшипниковыми щитами, с фланцем на подшипниковом
щите (или щитах),
3 - без лап с подшипниковыми щитами, с фланцем на одном
подшипниковом щите;
4 - без лап с подшипниковыми щитами, с фланцем на станине,
5 - без подшипниковых щитов,
6 - на лапах с подшипниковыми щитами и со стояковыми подшипниками;
7 - на лапах со стояковыми подшипниками (без подшиниковых щитов);
8 - с вертикальным валом, кроме групп от IM1 до IM4,
9 - специального исполнения по способу монтажа.
Вторая и третья цифры - способы монтажа (пространственное положение
машины) и направление конца вала, причем в обозначении направления
конца вала (3-я цифра) цифра 8 обозначает, что машина может работать
при любом из направлений конца вала, определенных цифрами 0-7, а
цифра 9 указывает, что направление конца вала машины отлично от
определенных цифрами от 0 до 8. В этом случае направление конца вала
указывается дополнительно в технической документации.
Четвертая цифра обозначает исполнение конца вала электрической
машины:
0 - без конца вала,
1 - с одним цилиндрическим концом вала,
2 - с двумя цилиндрическими концами вала,
3 - с одним коническим концом вала,
4 - с двумя коническими концами вала,
5 - с одним фланцевым концом вала,
6 - с двумя фланцевыми концами вала,
7 - с фланцевым концом вала на стороне D и цилиндрическим концом
вала на стороне N, причем под стороной D понимается при одном конце
вала для двигателей - приводная, а для генераторов
- приводимая сторона; при двух концах вала - сторона с концом вала
большего размера, а при равных диаметрах для машин на лапах с
коробкой выводов, расположенных не сверху, - сторона, с которой
коробка выводов видна справа,
8 - прочие исполнения конца вала.
Буквенные обозначения
установочно-присоединительных и габаритных размеров электрических
машин регламентированы ГОСТ 4541-70. Стандартом предписано применять
для обозначений строчные буквы латинского и греческого алфавитов с
подстрочными индексами:
b - ширина(в направлении, перпендикулярном оси вала);
d - диаметр;
h - высота;
l - длина (в направлении оси вала);
r - радиус;
t - размер в шпоночных соединениях;
а - угловой размер.
Подстрочные индексы к буквенным обозначениям установлены в
зависимости от их назначения:
1 - 9 - для валов;
10 - 19 - для размеров лап и фундаментных
плит;
20 - 29 - для размеров фланцев;
30 - 80 - для остальных установочно-присоединительных размеров;
80 и более - для размеров агрегатов и специальных машин.
Для упрощения монтажа электрических машин и агрегатов с
горизонтальной осью вращения и непосредственно соединяемых с ними на
общем или разных основаниях неэлектрических вращающихся машин
(ведомых и ведущих) установлен единый нормализованный ряд высот осей
вращения.
Согласно ГОСТ 13267-73 за высоту оси вращения принимают расстояние
от оси вращения до опорной плоскости машины. Толщина регулировочных
прокладок, применяемых при установке машины, в высоту оси вращения
не входит. Дистанционная прокладка входит в высоту оси вращения.
Вводные устройства (коробки выводов) электродвигателей серий АИ и 5А
располагаются сверху станины и допускают разворот с фиксацией через
180°.
Конструкция коробок выводов предусматривает возможность
подсоединения кабелей с медными и алюминиевыми жилами, с оболочкой
из резины или пластика, а также проводов в гибком металлическом
рукаве. Ввод осуществляется через один или два штуцера, либо через
удлинитель под сухую разделку или эпоксидную заделку кабеля.
Вводные устройства имеют следующие исполнения:
К3I
- с клеммной панелью выводов и одним
штуцером;
К3II
- с клеммной панелью выводов и двумя
штуцерами;
К3М - с клеммной панелью выводов и удлинителем;
К2I
- без клеммной панели выводов и с
одним штуцером;
K2II - без клеммной панели выводов и с двумя штуцерами.

Если во сне Вы просыпали на пол крупу, то Вас ждут потери. Для беременной женщины такой сон может быть предупреждением о...

Суп картофельный вегетарианскийПpодукты: 700 г каpтофеля, 1,4 л воды, 40 г сливочного масла, 2 яйца, 100 г сметаны, 0,5...

Современные понятия о красоте требуют от девушек серьезных усилий для достижения идеальной фигуры. Еще недавно параметры...

Думаете над тем, что приготовить на завтрак или ужин? Обратите внимание на гречку. Эта каша сытная и очень полезная....

Приготовление индюшачьего шашлыка: Филе промойте, обсушите, нарежьте поперёк волокон крупными кусками.Луковицу очистите,...

Домашняя выпечка - это нечто особенное, что придает дому особый аромат и атмосферу. Пожалуй, нет ничего вкуснее, чем...

Меланин является природным пигментом, придающим волосам, коже и радужной оболочке глаз человека их уникальный и...

Воинские звания в Иностранном легионе. Примечание: Галон - знак отличия во французской армии надеваемый на...

Существуют интересные и необычные приметы про змей. Их стоит знать, ведь, кто знает, где можно столкнуться с...
Огромное влияние человека на природу и масштабные последствия его деятельности послужили основой для создания...

Родился 11 мая 1946 г. В 1966 г. окончил Ярославское военное училище имени А.В. Хрулева и был назначен в СибВО...

Боевой путь 42-й гвардейской Евпаторийской Краснознаменной мотострелковой дивизии История 42-й гвардейской...
Человек как продукт биологической, социальной и культурной эволюции Появление человека Научное исследование...
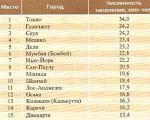
§ 4. Где проходит граница города? Юридическая и фактическая граница города. Каждый город имеет юридическую...

Суп картофельный вегетарианскийПpодукты: 700 г каpтофеля, 1,4 л воды, 40 г сливочного масла, 2 яйца, 100 г...

Современные понятия о красоте требуют от девушек серьезных усилий для достижения идеальной фигуры. Еще недавно...