К чему снится перестрелка с врагами?
По мишени: может означать фокусировку силы на определенной цели.Тщательно присмотритесь к своим жизненным целям, так как...
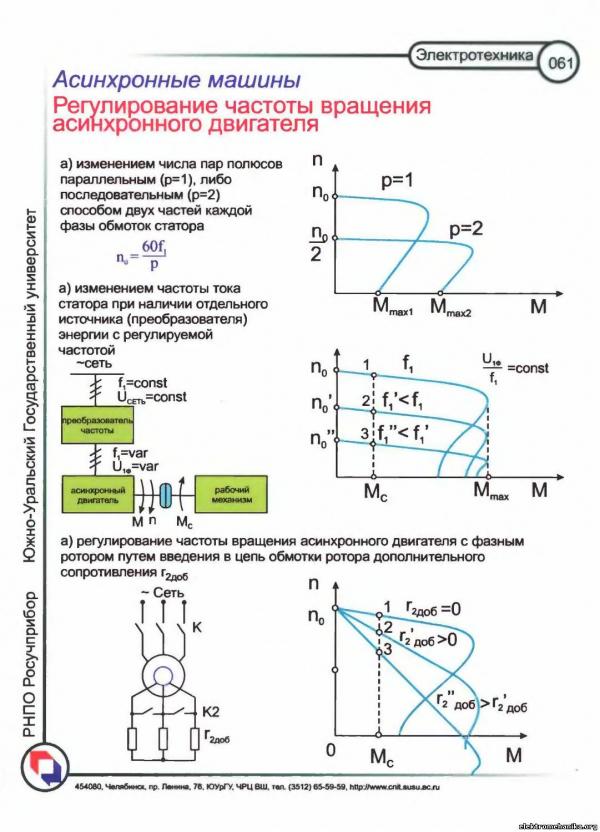
Регулируют изменением: частоты тока питающей сети; числа пар полюсов обмотки статора; параметров цепи статора или ротора. Для асинхронных электродвигателей применяются все три способа регулирования, для синхронных — только первый.
У коллекторных электродвигателей переменного тока частоту вращения регулируют способом, указанным для электродвигателя постоянного тока с последовательным возбуждением.
Регулирование частоты вращения изменением частоты тока является наиболее экономичным, но для питания электродвигателя требуется отдельный генератор или преобразователь с регулируемыми частотой и напряжением. При этом способе необходимо стремиться, чтобы характеристики асинхронного электродвигателя обладали достаточной жесткостью, которую обеспечивают совместным регулированием частоты тока и напряжения.
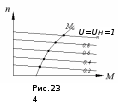
При пропорциональном понижении частоты тока и напряжения жесткость механической характеристики 1 (рис. 1) и максимальный момент Мmах уменьшаются незначительно по сравнению с естественной характеристикой 0. К преимуществам частотного регулирования следует отнести широкий диапазон (до 12:1) и плавность.
Регулирование частоты вращения изменением числа пар полюсов применяют только для асинхронных электродвигателей с короткозамкнутым ротором, так как у двигателей с фазным ротором потребовалось бы одновременное переключение обмотки ротора, усложняющее его схему и конструкцию.
Число пар полюсов можно изменить переключением числа секций одной обмотки или переключением двух независимых обмоток. В первом случае обмотка статора состоит из двух равных частей, включаемых последовательно или параллельно. Такое переключение позволяет изменить число пар полюсов в 2 раза и, следовательно, менять частоту вращения электродвигателя в отношении 2:1. Применение двух обмоток с различным числом пар полюсов позволяет менять частоту вращения в различных соотношениях, например, 1:3; 2:3 и т.д.
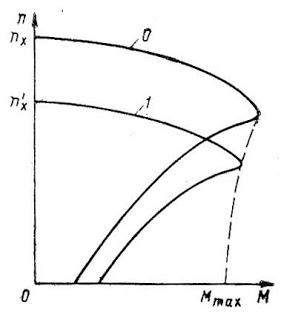
Рис. 1. Механические характеристики асинхронного электродвигателя при различной частоте тока
Кроме двухскоростных двигателей, применяют трех- и четырехскоростные. Промышленность выпускает двухскоростные двигатели с одной обмоткой в статоре, трех- и четырехскоростные — с двумя обмотками, которые в свою очередь могут переключаться в отношении 2:1. Этот способ регулирования экономичен (двигатели имеют достаточно жесткие характеристики), но требует сложного переключающего устройства; кроме того, у двигателей с двумя обмотками резко снижается использование активной меди, так как при работе одной из обмоток вторая выключена. Однако благодаря своим преимуществам двигатели с переключением числа пар полюсов широко применяются в судовых электроприводах, не требующих плавного регулирования частоты вращения (шпилей, брашпилей и др.).
Регулирование изменением параметров цепей электродвигателя распространено у двигателей с фазным ротором. При введении в цепь ротора активного сопротивления частота вращения двигателя уменьшается при том же значении вращающего момента (). Этот способ неэкономичен, требует дорогого и громоздкого реостата, причем уменьшение частоты вращения составляет 10—20 %, поэтому в судовых условиях он применяется сравнительно редко и в основном на короткие промежутки времени.
Пуск синхронных двигателей. Различают прямой пуск и пуск с ограничением пускового тока.
Прямой пуск прост, но при включении возникают большие пусковые токи, достигающие значений I п = (4-7) I ном.
При питании электродвигателя от электростанции ограниченной мощности пусковые токи могут вызвать недопустимые кратковременные снижения напряжения, нарушающие работу включенных приемников электрической энергии. Поэтому прямой пуск применяется в том случае, если мощность электродвигателя во много раз меньше мощности электростанции, от которой он питается.
При мощности электродвигателя соизмеримой с мощностью электростанции применяют различные способы пуска с ограничением пускового тока: переключением обмотки статора двигателя со ; при помощи ; включением резисторов в цепь статора; включением реакторов в цепь статора; включением резисторов в цепь ротора (для двигателей с фазным ротором).
При пуске переключением обмоток статора со «звезды» на «треугольник» сначала замыкается выключатель Q1, при этом обмотки статора двигателя оказываются включенными «звездой» (рис. 2, а). После разгона двигателя выключатель Q1 размыкается, а выключатель Q2 замыкается, и обмотки включаются на «треугольник». При этом способе пусковой ток уменьшается в 3 раза.
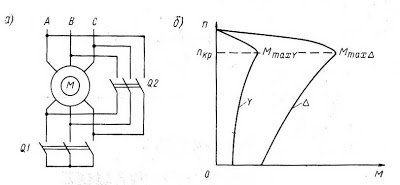
Рис. 2. Пуск двигателя переключением со «звезды» на «треугольник»
Преимуществом пуска двигателя с помощью автотрансформатора по сравнению с предыдущим способом является возможность установить любое первоначальное напряжение (рис. 3, а) и затем плавно увеличивать его. Недостатком этого способа являются высокая стоимость, большие масса и габаритные размеры пускового автотрансформатора. Характеристики приведены на рис. 3, б.
Включение на время пуска в цепь статора резисторов (рис. 4,а) или реакторов приводит к большим активным потерям в случае резисторов и уменьшению коэффициента мощности в случае реакторов, однако вследствие простоты этих способов они находят достаточно широкое применение. Как видно из формул () и (), включение элементов в цепь статора увеличивает критическую частоту вращения М mах1 и уменьшает момент M mах (характеристика 1, рис. 4, б).
Пуск двигателей с фазным ротором осуществляется с помощью пусковых реостатов, включенных в цепь ротора (рис. 5, а).
Пусковой реостат состоит из трех-четырех секций резисторов на каждую фазу. По мере разгона двигателя секции реостата поочередно закорачивают. Сопротивления пускового реостата рассчитывают графоаналитическим методом с использованием пусковой диаграммы. В начале пуска в цепь ротора включают реостат с полным сопротивлением, при котором пусковой момент должен быть М п = (0,7 - 0,8)Мmах.
Механические характеристики асинхронного двигателя на рабочем участке от М = 0 до М = 0,8 М mах можно приближенно считать прямолинейными, тогда на пусковой диаграмме (рис. 5, б) искусственная характеристика, соответствующая началу пуска, будет иметь вид прямой 4, проходящей через точки n х и г.
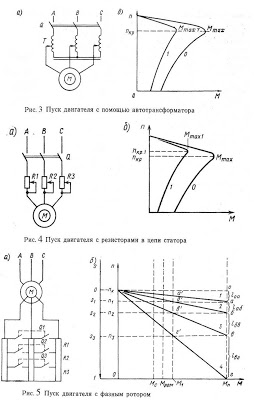
Рис. 3-5. Пуск двигателя с помощью автотрансформатора (3). Пуск двигателя с резисторами в цепи статора (4). Пуск двигателя с фазным ротором (5)
Для увеличения частоты вращения необходимо выключить секцию пускового реостата R3 (см. рис. 5), замкнув выключатель Q3. Обычно это делают в точке г" (см. рис. 5, б) при вращающем моменте двигателя M 1 = (1,1-1,2) M ном. Оставшееся сопротивление пускового реостата должно быть таким, чтобы момент двигателя на искусственной характеристике 3 не превышал значения пускового момента M п, т.е. характеристика 3 должна пройти через точку "в" (считается, что за время замыкания выключателя Q3 частота вращения двигателя n 3 не изменяется). Аналогично замыкают выключатели Q2 и Q1, двигатель переходит на работу в соответствии с характеристиками 2 и 1, пока не будет полностью шунтирован реостат.
Если для естественной характеристики 1
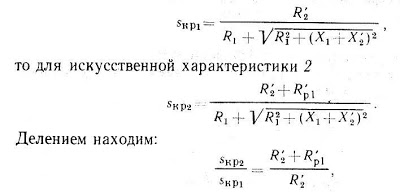
Т. е. отношение критических скольжений для искусственной характеристики 2 и естественной характеристики 1 равно отношению приведенного активного сопротивления фазы ротора, включая сопротивление секции пускового реостата, к приведенному активному сопротивлению ротора.
Видно, что при любых одинаковых моментах для естественной и искусственной характеристик имеет место условие s/s кp = const, следовательно, для характеристик 1 и 2 при моменте М = М п справедливо равенство
Активное сопротивление обмотки ротора двигателя определяется по каталогу. Если в каталоге данные о сопротивлении отсутствуют, его можно вычислить по формуле:

Режим торможения с отдачей энергии в сеть наступает при частоте вращения ротора, превышающей частоту вращения магнитного поля. Такой режим возможен при разгоне двигателя под действием падающего груза или при переключении много-скоростного электродвигателя на меньшую скорость.
При разгоне двигателя под действием падающего груза по естественной характеристике 0 (рис. 6) частота вращения увеличивается и при М = 0 достигает частоты вращения магнитного поля n х. При дальнейшем разгоне двигателя частота вращения становится больше n х, больше напряжения сети и машина работает в режиме генератора, отдавая в сеть активную энергию. Этому режиму соответствует участок характеристики в квадранте II.
Динамическое торможение асинхронного двигателя производится отключением обмотки статора от трехфазной питающей сети и включением ее на питание от источника постоянного тока (рис. 7), при этом в двигателе вместо вращающегося магнитного поля возникает неподвижное (n х = 0). В результате взаимодействия вращающегося ротора с неподвижным магнитным полем возникает тормозной момент (см. рис. 6, характеристика 1). Тормозной момент можно регулировать изменением напряжения постоянного тока или изменением сопротивления резистора R (см. рис. 7).

Рис. 6-7. Механические характеристики асинхронной машины при различных режимах работы (6). Схема динамического торможения асинхронного электродвигателя (7)
Торможение противовключением может быть получено при реверсировании двигателя на ходу путем переключения двух фаз обмотки статора, при этом магнитное поле начинает вращаться в обратную сторону и тормозит двигатель. На рис. 6 этому режиму соответствует участок характеристики 2, находящийся в квадранте II. Когда частота вращения двигателя уменьшится до нуля, его необходимо отключить, в противном случае он начнет вращаться в обратную сторону (участок характеристики 2 в квадранте III).
Сравнение способов торможения
Сравнивая различные способы торможения двигателей переменного тока, можно сделать вывод, что наиболее экономичным является торможение с отдачей энергии в сеть , но при нем нельзя затормозить двигатель до частоты вращения меньшей, чем частота вращения магнитного поля.
Динамическое торможение позволяет тормозить электродвигатель до частоты вращения, близкой к нулю, но требует дополнительного источника постоянного тока.
Торможение противовключением наименее эффективно , так как при больших тормозных токах тормозной момент на валу двигателя с короткозамкнутым ротором незначителен.
Поэтому данный способ торможения применяется только для двигателей с фазным ротором, у которых за счет введения в цепь ротора резисторов с большим сопротивлением можно увеличить тормозной момент при одновременном уменьшении тока (см. рис. 6, характеристика 3).
контакты и мы моментально примем все действия для удаления Вашего материала.
⇓ОБСУДИТЬ СТАТЬЮ⇓
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках. Правда, у него масса недостатков, и одни из них – это быстрый износ щеток, если их установка была проведена с искривлением, да и срок их эксплуатации достаточно низок. При износе происходит искрение, поэтому такой движок во взрывоопасных и запыленных помещениях использовать нельзя. Плюс ко всему электродвигатель постоянного тока стоит дорого. Чтобы изменить данную ситуацию, используют асинхронный двигатель и частотный регулятор для асинхронного двигателя.
Практически по всем показателям электродвигатели, работающие на переменном токе, превосходят аналоги на постоянном. Во-первых, они надежнее. Во-вторых, имеют меньшие габариты и вес. В-третьих, цена ниже. В-четвертых, они проще в эксплуатации и подключении.
А вот недостаток у них один – это сложность регулирования частоты вращения. В данном случае стандартные способы регулирования частоты асинхронных двигателей здесь не подойдут, а именно – изменения напряжения, установка сопротивления и так далее. Частотное управление асинхронным электрическим двигателем – была проблема номер один. Хотя теоретическая база известна аж с тридцатых годов прошлого столетия. Все дело упиралось в дороговизну частотного преобразователя. Все изменилось, когда изобрели микросхемы, с помощью которых через транзисторы стало возможным собрать преобразователь частоты с минимальной себестоимостью.
Итак, способ регулирования частоты вращения асинхронного двигателя основано на одной формуле. Вот она внизу.
ω=2πf/p, где
То есть, получается так, что изменить скорость вращения электродвигателя можно лишь путем изменения частоты напряжения. Что это дает на практике? Первое – это плавность работы мотора, особенно это будет чувствовать при пуске оборудования, когда сам двигатель работает под самыми высокими нагрузками. Второе – повышенное скольжение. За счет этого растет КПД, и снижаются потери мощностных характеристик.
Все современные преобразователи частоты построены на принципе так называемого двойного преобразования. То есть, переменный ток преобразуется в постоянный через неуправляемый выпрямитель и фильтр. Далее, через импульсный инвертор (он трехфазный) происходит обратное преобразование тока постоянного в ток переменный. Инвертор сам состоит из шести силовых ключей (транзисторных). Так вот каждая обмотка электрического движка подключается к определенным ключам выпрямителя (положительному или отрицательному). Именно инвертор изменяет частоту напряжения, которое прикладывается к статорным обмоткам. По сути, именно через него происходит частотное регулирования электродвигателя.

В этом приборе на выходе устанавливаются силовые транзисторы. Они выполняют роль ключей. Если сравнивать их с тиристорами, то необходимо отметить, что первые вырабатывают сигнал в виде синусоиды. Именно данная форма создает минимальные искажения.
Теперь сам принцип работы частотного преобразователя. Чтобы понять это, предлагаем разобрать рисунок ниже.
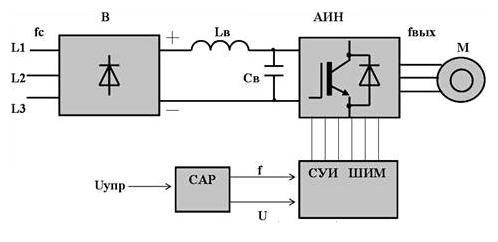
Итак, пройдемся по рисунку, где
По схеме очень хорошо видно, что инвертор регулирует частоту напряжения за счет системы широтно-импульсного управления (оно высокочастотное). Именно эта часть регулятора отвечает за подключение обмоток статора электродвигателя попеременно то к положительному полюсу выпрямителя, то к отрицательному. Периодичность подключения к полюсам происходит по синусоидальной кривой. При этом частота импульсов определяется именно частотой ШИМ. Так и происходит частотное регулирование.
Принцип
работы ДПТ.
Вмашине должно быть две
основные части: первая часть – создает
магнитный поток, вторая часть – в которой
индуктируется ЭДС. Первая часть в машине
постоянного тока неподвижна. К станине
(1) крепятся штампованные полюса (2) на
которых располагается обмотка возбуждения
(3). Вторая часть – якорь. Якорь вращается.
Представляет собой цилиндр набранный
из листов электротехнической стали
(4).В наружной части якоря расположены
пазы, где укладываются секции обмотки
(5). Каждая секция соединяется с пластинами
коллектора (6).
Электромагнитный момент зависит
от потока и тока якоря. В генераторном
режиме электромагнитный момент является
тормозным. Уравнение равновесного
состояния моментов запишется
,
где-
механический момент на валу генератора,-
момент хх,-
электромагнитный момент. Основное
уравнение движения электропривода.
Установившийся процесс, когда,,,
Если,,.
Если,,.
 Принцип
регулирования частоты вращения.
С точки зрения регулирования частоты
вращения, двигатель постоянного тока
является универсальным. Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы:
.
Принцип
регулирования частоты вращения.
С точки зрения регулирования частоты
вращения, двигатель постоянного тока
является универсальным. Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы:
.
Сопротивлением в цепи якоря. Уравнения токов до и после введения сопротивления
Откуда,
т. е. токи момент уменьшается ()
. При этоми
скоростьуменьшается. С уменьшением скороститок якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости.
Регулирование частоты вращения
сопротивлением в цепи якоря осуществляется
в сторону уменьшения скорости.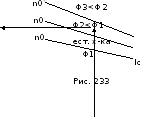
Потоком. Ток якоря до и после изменения потока ,, их отношение. Уравнение5.1. моментов . Уменьшим поток, Ток якоря возрос, тогда, тои(возрастает).
Напряжением. Регулирование частоты вращения производится следующими способами: А) Система генератор-двигатель (Г-Д). Б) Тиристорный преобразователь-двигатель (ТП-Д). В) Широтно-импульсное регулирование.
 А)
Система Г-Д, рис.234.
.
Увеличивая ток возбуждения генератораi вг,
возрастает поток Ф г
и Е г,
а следовательно увеличивается напряжение
на якоре двигателя и скорость возрастает.
А)
Система Г-Д, рис.234.
.
Увеличивая ток возбуждения генератораi вг,
возрастает поток Ф г
и Е г,
а следовательно увеличивается напряжение
на якоре двигателя и скорость возрастает.

Б) Тиристорный преобразователь-двигатель. Увеличивая угол управления - площадь полупериода уменьшается, уменьшается среднее значение напряжения -U ср, а следовательно уменьшается скорость вращения.
В) Широтно-импульсное регулирование.
Изменяя
время импульса t и
изменяется скважность
,
гдеt и
- время импульса; t п
- время паузы. Среднее значение U ср =U 0 .
.
Способы регулирования активной и реактивной мощности синхронного генератора. Как только что видели, что если изменять возбуждение генератора, то тем самым будем изменять реактивную мощность, отдавать, либо потреблять. Регулировать активную мощность можно только изменяя механическую мощность со стороны паровой турбины, либо гидротурбины. При увеличении отдаваемой активной мощности, необходимо увеличить и механическую мощность со стороны турбины.
Пуск СД. для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. В виду отсутствия пускового момента в синхронном двигателе для пуска его используют следующие способы:1 Пуск с помощью вспомогательного двигателя; 2Асинхронный пуск двигателя.
1.Пуск в ход синхронного двигателя с помощью вспомогательного двигателя может быть произведен только без механической нагрузки на его валу, т.е. практически вхолостую. В этом случае на период пуска двигатель временно превращается в синхронный генератор, ротор которого приводится во вращение небольшим вспомогательным двигателем до n=0,95n 1 . Статор этого генератора включается параллельно в сеть с соблюдением условий этого соединения. После включения статора в сеть, с небольшой выдержкой, включают обмотку возбуждения, и двигатель втягивается в синхронизм, а вспомогательный приводной двигатель механически отключается. Этот способ пуска сложен и имеет к тому же вспомогательный двигатель.
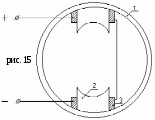
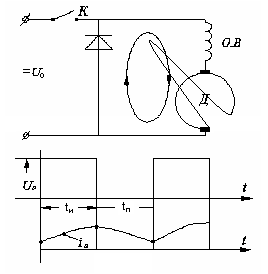
2.
синхронный двигатель на время пуска
превращается в асинхронный. Для
возможности образования асинхронного
пускового момента в пазах полюсных
наконечников явнополюсного двигателя
помещается пусковая короткозамкнутая
обмотка. Процесс пуска синхронного
двигателя осуществляется в два этапа.
При включении обмотки статора (1) в сеть
в двигателе образуется вращающее поле,
которое наведет в короткозамкнутой
обмотке ротора (2) ЭДС. Под действием,
которой будет протекать в стержнях ток.
В результате взаимодействия вращающего
магнитного поля с током в короткозамкнутой
обмотке создается вращающий момент,
как у асинхронного двигателя. За счет
этого момента ротор разгоняется до
скольжения близкого к нулю (S=0,05),
рис. 313. На этом заканчивается первый
этап. Чтобы ротор двигателя втянулся в
синхронизм, необходимо создать в нем
магнитное поле включением в обмотку
возбуждения (3) постоянного тока
(переключив ключ К в положение 1). Так
как ротор разогнан до скорости близкой
к синхронной, то относительная скорость
поля статора и ротора небольшая. Полюса
плавно будут находить друг на друга. И
после ряда проскальзываний, противоположные
полюса притянутся, и ротор втянется в
синхронизм. После чего ротор будет
вращаться с синхронной скоростью, и
частота вращения его будет постоянной,
рис. 313. На этом заканчивается второй
этап пуска. Работа
СД при недовозбужденном и перевозбужденном
режимах(ib
=
var
).
Режим работы соответствует постоянству
момента.
при. При недовозбужденном синхронном
двигателе составляющей напряжения -Е 0
соответствует ток I,
который отстает от напряжения Uc
на угол φ.
Реактивная составляющая тока I L
будет отставать на 90 0
от вектора напряжения Uc,
т.е. этот ток чисто индуктивный. Значит,
при недовозбуждении двигатель будет
потреблять из сети индуктивный ток, а
следовательно будет потреблять из сети
и реактивную мощность.
При
увеличении возбуждения величина –Е 0 1
увеличится, а ток I
уменьшится до Ia=I 1
и будет минимальным. При этом режиме СД
будет работать с cosφ=1
и реактивная мощность, не будет ни
потребляться, ни отдаваться в сеть. При
дальнейшем увеличении тока возбуждения
составляющая напряжения будет равна
–Е 0 11 ,
а ток I 11
, будет опережать вектор напряжения
сети на угол φ 1 .
Этот режим соответствует перевозбужденному
режиму. Реактивная составляющая тока
будет емкостной (опережает вектор Uc
на 90 0).
Этот режим будет соответствовать отдаче
реактивной мощности в сеть. Этот режим
аналогичен включению статических
емкостей в сеть.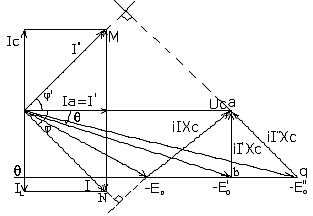

Итак видим, что если изменять ток возбуждения iB, то величина тока статора I будет изменяться по величине и по фазе, т.е. можно регулировать cosφ. Это ценное свойство и определяет использование синхронных двигателей. Зависимости тока статора I от тока возбуждения iв, I=f(iв) называются U-образные характеристики, рис. 309. Р 2 > Р 1 . Характеристики снимаются при P=const. Режим работы соответствующий току возбуждения от 0 до пунктирной линии недовозбужденный, а за пунктирной линией – перевозбужденный с отдачей реактивной энергии в сеть.
![]()
Регулирование частоты вращения двигателей определяется в соответствии с требованиями
технологических процессов и тех производственных механизмов, в которых они используются.
Оно характеризуется следующими основными показателями.
Диапазон регулирования Д
(предел изменения частоты вращения).
Под этой величиной понимается отношение максимальной частоты вращения двигателя
к его минимальной частоте вращения.
Плавность регулирования
, которая характеризуется минимальным
скачком частоты вращения двигателя при переходе с одной механической характеристики
на другую.
Направление возможного изменения частоты вращения двигателя (зона
регулирования).
При номинальных условиях работы (напряжении и частоте питающей сети) двигатель
имеет естественную механическую характеристику. При регулировании частоты вращения
соответствующие им характеристики будут отличаться от естественной. Эти характеристики
носят название искусственных (регулировочных) характеристик. С помощью одних
методов регулирования удается получить искусственные характеристики, располагающиеся
только ниже естественной. Другие методы обеспечивают регулирование частоты вращения
выше и ниже естественной характеристики. Экономичность регулирования определяется
по дополнительным капитальным затратам, необходимым при создании регулировочных
устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронных двигателей может производиться способом воздействия на него со стороны статора или со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Регулирование частоты вращения изменением частоты питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода. При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя. Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения, чтобы обеспечить высокую жесткость механической характеристики и требуемую перегрузочную способность двигателя. При регулировании частоты вращения асинхронных двигателей изменением частоты питающей сети можно обеспечить различные режимы работы: с постоянным вращающим моментом; с постоянной мощностью на валу; с моментом, пропорциональным квадрату частоты.
Зависимости между регулируемыми напряжением и частотой с учетом влияния активного сопротивления статора, изменения жесткости механических характеристик, насыщения стали, ухудшения теплоотдачи на низких частотах вращения ротора двигателя имеют довольно сложный характер. В качестве источника питания могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи частоты на полупроводниковых приборах, которые серийно выпускает промышленность. Положительным свойством частотного регулирования является возможность плавного регулирования в широком диапазоне в обе стороны от естественной характеристики (в том числе возможно вращение двигателя с частотой, большей номинальной). При регулировании обеспечивается жесткость характеристик и высокая перегрузочная способность. Однако в ряде случаев в приводах металлообрабатывающих станков, электрошпинделей, мощных воздуходувок и других механизмов частотное регулирование является наиболее приемлемым.
Регулирование частоты вращения изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. При неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Кроме двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных - две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин. Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин. К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях. Регулирование частоты вращения изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании.
Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку. При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется.
Для регулирования частоты вращения уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя, в результате чего изменяются и значения рабочих скольжений. При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента. Таким образом, перегрузочная способность двигателя при регулировании не снижается.

По мишени: может означать фокусировку силы на определенной цели.Тщательно присмотритесь к своим жизненным целям, так как...

КОНСПЕКТ УРОКА ОКРУЖАЮЩЕГО МИРА ДЛЯ 3 КЛАССА. УМК «Школа России» Тема: Воздух и его охрана. Цель урока:...

Краткое описание карты: На рисунке мы видим, как шестеро атакуют одного, но у него есть явное преимущество: он находится...
Презентация «Безопасная дорога - детям» Актуальность Необходимость обучения детей ПДД, так как дети часто являются...

Рыбы, не сближайтесь с людьми, которые постоянно осыпают вас комплиментами — возможно, они втираются в доверие и хотят...

Отвечает Мария Бунеева, Эксперт Немецкого детского онлайн-университета В европейской католической традиции заяц,...

← 1132 - 1471 Столица Киев Язык(и) Древнерусский Религия Православное христианство Население восточные...

Если во сне Вы просыпали на пол крупу, то Вас ждут потери. Для беременной женщины такой сон может быть...

Суп картофельный вегетарианскийПpодукты: 700 г каpтофеля, 1,4 л воды, 40 г сливочного масла, 2 яйца, 100 г...

Современные понятия о красоте требуют от девушек серьезных усилий для достижения идеальной фигуры. Еще недавно...

Думаете над тем, что приготовить на завтрак или ужин? Обратите внимание на гречку. Эта каша сытная и очень...

Приготовление индюшачьего шашлыка: Филе промойте, обсушите, нарежьте поперёк волокон крупными кусками.Луковицу...

Домашняя выпечка - это нечто особенное, что придает дому особый аромат и атмосферу. Пожалуй, нет ничего...

Меланин является природным пигментом, придающим волосам, коже и радужной оболочке глаз человека их уникальный и...

КОНСПЕКТ УРОКА ОКРУЖАЮЩЕГО МИРА ДЛЯ 3 КЛАССА. УМК «Школа России» Тема: Воздух и его охрана. Цель...

Краткое описание карты: На рисунке мы видим, как шестеро атакуют одного, но у него есть явное преимущество: он...