Полезные свойства протеинового коктейля
Светлана МарковаКрасота - как драгоценный камень: чем она проще, тем драгоценнее!16 мар. 2017 г. Белок является ключевым...
Асинхронный двигатель имеет неподвижную
часть, именуемую статором
, и вращающуюся
часть, называемую ротором
. В статоре размещена обмотка, создающая вращающееся магнитное поле.
Различают асинхронные двигатели с короткозамкнутым и фазным ротором.
В пазах ротора с короткозамкнутой обмоткой размещены алюминиевые или медные стержни. По торцам стержни замкнуты алюминиевыми или медными кольцами. Статор и ротор набирают из листов электротехнической стали, чтобы уменьшить потери на вихревые токи.
Фазный ротор имеет трехфазную обмотку (для трехфазного двигателя). Концы фаз соединены в общий узел, а начала выведены к трем контактным кольцам, размещенным на валу. На кольца накладывают неподвижные контактные щетки. К щеткам подключают пусковой реостат. После пуска двигателя сопротивление пускового реостата плавно уменьшают до нуля.
Принцип действия асинхронного двигателя рассмотрим на модели, представленной на рисунке 12.4.
 . (12.2)
. (12.2)
Скольжение не может быть равным нулю, так как при одинаковых скоростях поля и ротора прекратилось бы наведение токов в роторе и, следовательно, отсутствовал бы электромагнитный вращающий момент.
Вращающий электромагнитный момент уравновешивается противодействующим тормозным моментом М эм = М 2 .
С увеличением нагрузки на валу двигателя тормозной момент становится больше вращающего, и скольжение увеличивается. Вследствие этого, возрастают индуктированные в роторной обмотке ЭДС и токи. Вращающий момент увеличивается и становится равным тормозному моменту. Вращающий момент может возрастать с увеличением скольжения до определенного максимального значения, после чего при дальнейшем увеличении тормозного момента вращающий момент резко уменьшается, и двигатель останавливается.
Скольжение заторможенного двигателя равно единице. Говорят, что двигатель работает в режиме короткого замыкания.
Частота вращения ненагруженного асинхронного двигателя n 2 приблизительно равна синхронной частоте n 1 . Скольжение ненагруженного двигателя S &asimp; 0. Говорят, что двигатель работает в режиме холостого хода.
Скольжение асинхронной машины, работающей в режиме двигателя, изменяется от нуля до единицы.
Асинхронная машина может работать в режиме генератора. Для этого ее ротор необходимо вращать сторонним двигателем в направлении вращения магнитного поля статора с частотой n 2 > n 1 . Скольжение асинхронного генератора  .
.
Асинхронная машина может работать в режиме электромашинного тормоза. Для этого необходимо ее ротор вращать в направлении, противоположном направлению вращения магнитного поля статора.
В этом режиме S > 1. Как правило, асинхронные машины используются в режиме двигателя. Асинхронный двигатель является наиболее распространенным в промышленности типом двигателя. Частота вращения поля в асинхронном двигателе жестко связана с частотой сети f 1 и числом пар полюсов статора. При частоте f 1 = 50 Гц существует следующий ряд частот вращения.
| P | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| n 1 , об/мин | 3 000 | 1500 | 1000 | 750 |
На ротор и полюсы статора действуют электромагнитные вращающие
моменты, одинаковые по величине и направленные в противоположные стороны.
Мощность, необходимая для вращения статорных полюсов с синхронной частотой,
 ,
,
Где - угловая скорость.
Механическая мощность, развиваемая ротором,

Где  - угловая скорость ротора.
- угловая скорость ротора.
Разность мощностей
Где Р Э2 - электрические потери в роторной обмотке;
m 2 - число фаз обмотки ротора;
R 2 - активное сопротивление обмотки ротора;
I 2 - ток ротора.
Откуда
 (12.7).
(12.7).
 .
.
Где , КТ - коэффициент трансформации двигателя с заторможенным ротором.
 (12.8).
(12.8).
Где  - константа.
- константа.
На рис. 12.5 изображена зависимость электромагнитного момента от скольжения в виде сплошной линии.
Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2.
На рис.12.5 имеются две точки, для которых справедливо равенство М эм = М 2
;
это точки а
и в
.
В точке а
двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие М эм = М 2
;.
В точке в
работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а
.
Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть - областью неустойчивой работы. Точка б
, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы.
Максимальному значению вращающего момента соответствует критическое скольжение S k
. Скольжению S = 1
соответствует пусковой момент. Если величина противодействующего тормозного момента М 2
больше пускового МП, двигатель при включении не запустится, останется неподвижным.
Максимальный момент найдем следующим образом. Сначала определим значение критического скольжения, при котором функция М эм
будет максимальной. Для этого первую производную функции по скольжению S
от выражения (12.8) приравняем нулю.
Откуда
Подставив значение критического скольжения в формулу (12.8) , получим
 . (12.10)
. (12.10)
Из формул (12.8), (12.9), (12.10) видно:
Механической характеристикой асинхронного двигателя называется зависимость частоты вращения двигателя от момента на валу n 2 = f (M 2). Механическую характеристику получают при условии U 1 - const, f 1 - const. Механическая характеристика двигателя является зависимостью вращающего момента от скольжения, построенной в другом масштабе. На рис. 12.6 изображена типичная механическая характеристика асинхронного двигателя. Результирующий, или основной, магнитный поток в воздушном зазоре машины в пусковом режиме, а также ЭДС в статоре и роторе Е 1 и Е 2 значительно уменьшаются. Это приводит к уменьшению пускового момента двигателя и к резкому возрастанию пускового тока.
- величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
- с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений (см. кривая 1 рис. 12,5);
- вращающий момент пропорционален квадрату напряжения сети.
 . (12.11)
. (12.11)
Из формулы (12.11) видно, что частоту вращения асинхронного двигателя можно менять тремя способами:
Асинхронные двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
- изменением частоты питающего напряжения;
- изменением числа полюсов двигателя. Для этого в пазы статора закладывают обмотку, которую можно переключать на различное число полюсов;
- изменением скольжения. Этот способ можно применить в асинхронных двигателях с фазным ротором. Для этого в цепь ротора включают регулировочный реостат. Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения от S a к S г (см. рис. 12.5), а, следовательно, и к уменьшению частоты вращения двигателя.
Однофазный двигатель имеет одну обмотку, расположенную на статоре. Однофазная обмотка, питаемая переменным током, создаст пульсирующее магнитное поле. Поместим в это поле ротор с короткозамкнутой обмоткой. Ротор вращаться не будет. Если раскрутить ротор сторонней механической силой в любую сторону, двигатель будет устойчиво работать.
Объяснить это можно следующим образом.
Пульсирующее магнитное поле можно заменить двумя магнитными полями,
вращающимися в противоположных направлениях с синхронной частотой n 1 и имеющими амплитуды магнитных потоков, равные половине амплитуды магнитного потока пульсирующего поля. Одно из магнитных полей называется прямовращающимся, другое - обратновращающимся. Каждое из магнитных полей индуктирует в роторной обмотке вихревые токи. При взаимодействии вихревых токов с магнитными полями образуются вращающие моменты, направленные встречно друг другу.
На рис. 12.7 изображены зависимости момента от прямого поля М", момента от
обратного поля М" и результирующего момента М в функции скольжения М = М" - M".
Оси скольжений направлены встречно друг другу.
В пусковом режиме на ротор действуют вращающие моменты, одинаковые по величине и противоположные по направлению.
Раскрутим ротор сторонней силой в направлении прямовращающегося магнитного поля. Появится избыточный (результирующий) вращающий момент, разгоняющий ротор до скорости, близкой к синхронной. При этом скольжение двигателя относительно прямовращающегося магнитного поля
![]() .
.
Скольжение двигателя относительно обратновращающегося магнитного поля
 .
.
Рассматривая результирующую характеристику, можно сделать следующие выводы:
1. Однофазный двигатель не имеет пускового момента. Он будет вращаться в ту сторону, в которую раскручен внешней силой.Для создания пускового момента однофазные двигатели снабжают пусковой обмоткой, пространственно смещенной относительно основной, рабочей обмотки на 90 o . Пусковая обмотка подключается к сети через фазосдвигающие элементы: конденсатор или активное сопротивление.
2. Из-за тормозного действия обратновращающегося поля характеристики однофазного двигателя хуже, чем трехфазного.
В схеме на рис. 12.9а статорные обмотки соединены звездой.
В схеме на рис. 12.9б статорные обмотки соединены треугольником. Величина емкости С ≈ 60 мкф на 1 кВт мощности.
Частота вращения асинхронного двигателя
n = n 1 (1 – s) = (60f 1 /p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f 1 питающего напряжения, число пар полюсов р и
скольжение s. Последнее при заданных значениях момента на валу М вн и частоты f 1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) - двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n 1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n 1 , то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n 1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
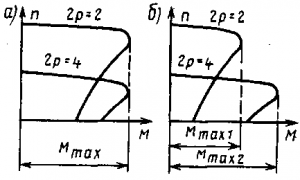
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f 1 = 50 Гц частота вращения поля n 1 при переключениях изменяется в отношении 3000:1500:1000:750.
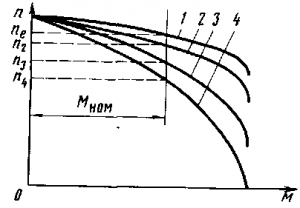
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (R п4 , R пЗ, R п2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту М ном (рис. 268) будут соответствовать меньшие частоты вращения n 4 , n 3 , n 2 и т. д., чем частота n е при работе двигателя на естественной характеристике 1 (при R п = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
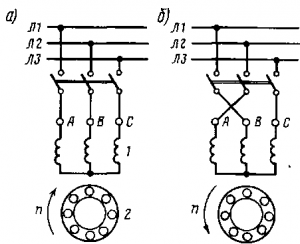
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А - фаза В - фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В - фаза А - фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
Электродвигатели. Асинхронные двигатели
Асинхронными двигателями называются электрические машины, имеющие по крайней мере две обмотки, в которых переменные напряжения сдвинуты по фазе относительно друг друга.
Принцип действия
В асинхронных системах появляется возможность создать в механически неподвижном устройстве вращающееся магнитное поле. Катушка, подключенная к источнику переменного тока, образует пульсирующее магнитное поле, т. е. магнитное поле, изменяющееся по значению и направлению.
Рис. 16.6. Подключение катушек двигателя к источнику трехфазного напряжения
Рис. 16.7. График изменения токов трехфазной системы
В цилиндре с внутренним диаметром D размещают на поверхности три катушки, пространственно смещенные относительно друг друга на 120°. Катушки подключены к источнику трехфазного напряжения (рис, 16.6). На рис. 16.7 показан график изменения мгновенных токов, образующих трехфазную систему.
Каждая из катушек создает пульсирующее магнитное поле. Магнитные поля катушек, взаимодействуя друг с другом, образуют результирующее вращающееся магнитное поле, характеризующееся вектором результирующей магнитной индукции .
На рис. 16.8 изображены векторы магнитной индукции каждой фазы и результирующий вектор , построенные для трех моментов времени t 1 , t 2 , t 3 . Положительные направления осей катушек обозначены +1, +2, +3.
В момент t = t 1 ток и магнитная индукция в катушке А-Х положительны и максимальны, в катушках B-Y и C-Z - одинаковы и отрицательны. Вектор результирующей магнитной индукции равен геометрической сумме векторов магнитных индукций катушек и совпадает с осью катушки А-Х. В момент t = t 2 токи в катушках А-Х и C-Z одинаковы по величине и противоположны по направлению. Ток в фазе В равен нулю. Результирующий вектор магнитной индукции повернулся по часовой стрелке на 30°.
Рис. 16.8. Векторы магнитной индукции для трех моментов времени
В момент t = t 3 токи в катушках А-Х и B-Y одинаковы по величине и положительны, ток в фазе C-Z максимален и отрицателен, вектор результирующего магнитного поля размещается в отрицательном направлении оси катушки C-Z. За период переменного тока вектор результирующего магнитного поля повернется на 360°. Линейная скорость перемещения вектора магнитной индукции
где - частота переменного напряжения; Т - период синусоидального тока; пг - частота вращения магнитного поля или синхронная частота вращения. За период Т магнитное поле перемещается на расстояние где
Полюсное деление или расстояние между полюсами магнитного
поля по длине окружности цилиндра диаметром D.
Линейная скорость откуда
где n 1 - синхронная частота вращения многополюсного магнитного поля с числом пар полюсов Р.
Катушки, изображенные на рис. 16.6, создают двухполюсное магнитное поле, с числом полюсов 2Р = 2. Частота вращения поля равна 3000 об/мин. Чтобы получить четырехполюсное магнитное поле, необходимо внутри цилиндра диаметром D поместить шесть катушек, по две на каждую фазу. Тогда, согласно формуле (16.7), магнитное поле будет вращаться в два раза медленнее, с n 1 = 1500 об/мин.
Чтобы получить вращающееся магнитное поле, необходимо выполнить два условия :
Конструкция
Асинхронный двигатель имеет неподвижную часть, именуемую статором, и вращающуюся часть, называемую ротором. В статоре размещена обмотка, создающая вращающееся магнитное поле. Различают асинхронные двигатели с короткозамкнутым и фазным ротором. В пазах ротора с короткозамкнутой обмоткой размещены алюминиевые или медные стержни. По торцам стержни замкнуты алюминиевыми или медными кольцами. Статор и ротор набирают из листов электротехнической стали, чтобы уменьшить потери на вихревые токи. Фазный ротор имеет трехфазную обмотку (для трехфазного двигателя). Концы фаз соединены в общий узел, а начала выведены к трем контактным кольцам, размещенным на валу. На кольца накладывают неподвижные контактные щетки. К щеткам подключают пусковой реостат. После пуска двигателя сопротивление пускового реостата плавно уменьшают до нуля.
Принцип действия асинхронного двигателя
Принцип действия асинхронного двигателя рассмотрим на модели, изображенной на рис. 16.9.
Вращающееся магнитное поле статора представим в виде постоянного магнита, вращающегося с синхронной частотой вращения щ. В проводниках замкнутой обмотки ротора индуктируются токи. Полюса магнита перемещаются по часовой стрелке. Наблюдателю, разместившемуся на вращающемся магните, кажется, что магнит неподвижен, а проводники роторной обмотки перемещаются против часовой стрелки. Направления роторных токов, определенные по правилу правой руки, указаны на рис. 16.9.
Рис. 16.9. Модель асинхронного двигателя
Пользуясь правилом левой руки, найдем направление электромагнитных сил, действующих на ротор и заставляющих его вращаться. Ротор двигателя будет вращаться с частотой вращения n 1 в направлении вращения поля статора. Ротор вращается асинхронно, т. е. частота его вращения n 2 меньше частоты вращения поля статора w. Относительная разность скоростей поля статора и ротора называется скольжением:
Скольжение не может быть равным нулю, так как при одинаковых скоростях поля и ротора прекратилось бы наведение токов в роторе и, следовательно, отсутствовал бы электромагнитный вращающий момент.
Вращающий электромагнитный момент уравновешивается противодействующим тормозным моментом С увеличением нагрузки на валу двигателя тормозной момент становится больше вращающего, и скольжение увеличивается. Вследствие этого возрастают индуктированные в роторной обмотке ЭДС и токи. Вращающий момент увеличивается и становится равным тормозному моменту. Вращающий момент может возрастать с увеличением скольжения до определенного максимального значения, после чего при дальнейшем увеличении тормозного момента вращающий момент резко уменьшается, и двигатель останавливается.
Если скольжение заторможенного двигателя равно единице, то говорят, что двигатель работает в режиме короткого замыкания. Частота вращения ненагруженного асинхронного двигателя n 2 приблизительно равна синхронной частоте n 1 .
Если скольжение ненагруженного двигателя S = 0, то говорят, что двигатель работает в режиме холостого хода.
Скольжение асинхронной машины, работающей в режиме двигателя, изменяется от нуля до единицы. Асинхронная машина может работать в режиме генератора. Для этого ее ротор необходимо вращать сторонним двигателем в направлении вращения магнитного поля статора с частотой n 2 > n 1 . Скольжение асинхронного генератора S < 0.
Асинхронная машина может работать в режиме электромашинного тормоза. Для этого необходимо ее ротор вращать в направлении, противоположном направлению вращения магнитного поля статора. В этом режиме S > 1.
Как правило, асинхронные машины используются в режиме двигателя. Асинхронный двигатель является наиболее распространенным в промышленности типом двигателя. Частота вращения поля в асинхронном двигателе жестко связана с частотой сети f 1 и числом пар полюсов статора.
При частоте f 1 = 50 Гц существует следующий ряд частот вращения (Р - n 1 , об/мин):
Из формулы (16.7) получим
Скорость поля статора относительно ротора называется скоростью скольжения
![]()
Частота тока и ЭДС в роторной обмотке
Асинхронная машина с заторможенным ротором работает как трансформатор. Основной магнитный поток индуктирует в статорной и в неподвижной роторной обмотках ЭДС Е 1 и Е 2K:
где Ф m - максимальное значение основного магнитного потока, сцепленного со статорной и роторной обмотками; W 1 и W 2 - числа витков статорной и роторной обмоток; - частота напряжения в сети; К 01 и К 02 - обмоточные коэффициенты статорной и роторной обмоток.
Чтобы получить более благоприятное распределение магнитной индукции в воздушном зазоре между статором и ротором, статорные и роторные обмотки не сосредоточивают в пределах одного полюса, а распределяют по окружностям статора и ротора. ЭДС распределенной обмотки меньше ЭДС сосредоточенной обмотки. Этот факт учитывается введением в формулы, определяющие величины электродвижущих сил обмоток, обмоточных коэффициентов. Величины обмоточных коэффициентов несколько меньше единицы. ЭДС в обмотке вращающегося ротора
Ток ротора работающей машины
где R 2 - активное сопротивление роторной обмотки; х 2 - индуктивное сопротивление роторной обмотки,
Где x 2K - индуктивное сопротивление заторможенного ротора. Тогда
Однофазный двигатель имеет одну обмотку, расположенную на статоре. Однофазная обмотка, питаемая переменным током, создаст пульсирующее магнитное поле. Поместим в это поле ротор с короткозамкнутой обмоткой. Ротор вращаться не будет. Если раскрутить ротор сторонней механической силой в любую сторону, двигатель будет устойчиво работать. Объяснить это можно следующим образом.
Пульсирующее магнитное поле можно заменить двумя магнитными полями, вращающимися в противоположных направлениях с синхронной частотой п1 и имеющими амплитуды магнитных потоков, равные половине амплитуды магнитного потока пульсирующего поля. Одно из магнитных полей называется прямовращающимся, другое - обратновращающимся. Каждое из магнитных полей индуктирует в роторной обмотке вихревые токи. При взаимодействии вихревых токов с магнитными полями образуются вращающие моменты, направленные встречно друг другу. На рис. 16.10 изображены зависимости момента от прямого поля М", момента от обратного поля М" и результирующего момента М в функции скольжения М = М" - М".
Рис. 16.10. Зависимость момента прямого поля, обратного поля и результирующего момента от скольжения
Оси скольжений направлены встречно друг другу. В пусковом режиме на ротор действуют вращающие моменты, одинаковые по величине и противоположные по направлению. Раскрутим ротор сторонней силой в направлении прямовращающегося магнитного поля. Появится избыточный (результирующий) вращающий момент, разгоняющий ротор до скорости, близкой к синхронной. При этом скольжение двигателя относительно прямовращающегося магнитного поля
![]()
Скольжение двигателя относительно обратновращающегося магнитного поля
Рассматривая результирующую характеристику, можно сделать следующие выводы.
Вывод 1 . Однофазный двигатель не имеет пускового момента. Он будет вращаться в ту сторону, в которую раскручен внешней силой.
Вывод 2. Из-за тормозного действия обратновращающегося поля характеристики однофазного двигателя хуже, чем трехфазного.
Для создания пускового момента однофазные двигатели снабжают пусковой обмоткой, пространственно смещенной относительно основной, рабочей обмотки на 90°. Пусковая обмотка подключается к сети через фазосдвигающие элементы: конденсатор или активное сопротивление.
На рис, 16.11 показана схема включения обмоток двигателя, где Р - рабочая обмотка, П - пусковая обмотка. Емкость фазосдвигающего элемента С подбирают таким образом, чтобы токи в рабочей и пусковой обмотках различались по фазе на 90°. Трехфазный асинхронный двигатель может работать от однофазной сети, если подключить его обмотки по следующим схемам (рис. 16.12).
В схеме, изображенной на рис. 16.12, а статорные обмотки соединены звездой, а в схеме на рис. 16.12, б - треугольником. Величина емкости С ~ 60 мкФ на 1 кВт мощности.
Рис. 16.11. Схема включения обмоток однофазного двигателя
Рис. 16.12. Схемы включения обмоток трехфазного двигателя на одну фазу: а - первый вариант; б - второй вариант
Принцип действия асинхронного двигателя основан на использовании вращающихся магнитных полей и основных законов электротехники.
При включении двигателя в сеть трехфазного тока в статоре образуется постоянное по величине, но вращающееся в пространстве магнитное поле, силовые линии которого пересекают витки обмоток ротора. При этом согласно закону электромагнитной индукции, в обмотке ротора индуцируется ЭДС, величина которой пропорциональна частоте пересечения силовых линий. Под действием индуцированной ЭДС в короткозамкнутом роторе возникают значительные токи.
В соответствии с законом Ампера на проводники с током, находящиеся в магнитном поле, действуют механические силы, которые по принципу Ленца стремятся устранить причину, вызывающую индуцированный ток, т.е. пересечение стержней обмотки ротора силовыми линиями вращающегося поля. Таким образом, возникшие механические силы будут раскручивать ротор в направлении вращения поля, уменьшая скорость пересечения стержней обмотки ротора магнитными силовыми линиями.
Достичь частоты вращения поля в реальных условиях ротор не может, так как тогда стержни его обмотки оказались бы неподвижными относительно магнитных силовых линий и индуцированные токи в обмотке ротора исчезли бы. Поэтому ротор вращается с частотой, меньшей частоты вращения поля, т.е. не синхронно с полем или асинхронно .
Для изменения направления вращения ротора асинхронного двигателя необходимо изменить направление вращения магнитного поля, т.е. изменить порядок чередования фаз обмоток статора переключением любых двух из трех фазных проводов, питающих двигатель.
Частота вращения магнитного поля n 1 (синхронная частота вращения ) жестко зависит от частотыf 1 подводимого напряжения и количества пар полюсовp двигателя:n 1 = 60f 1 /p .
Из этого вытекает, что при принятой в России промышленной частоте питающего напряжения (f 1 = 50 Гц) наибольшее число оборотов магнитного поля оказывается равным 3000 об/мин приp = 1. При увеличении числа пар полюсов частота вращения магнитного поля уменьшается, а следовательно, снижается и частота вращения ротора. Приp = 2,n = 1500 об/мин и т.д.
Если силы, тормозящие вращение ротора, невелики, то ротор вращается с частотой, близкой к частоте вращения поля. При увеличении нагрузки на валу двигателя частота вращения ротора уменьшается, токи в витках его обмоток увеличиваются, что приводит к возрастанию вращающего момента двигателя. При некоторой частоте вращения ротора устанавливается равновесие между тормозным и вращающим моментами.
Обозначим через n 2 частоту вращения ротора асинхронного двигателя, а черезn 1 частоту вращения магнитного поля. В предыдущем разделе было показано, чтоn 2 <n 1 .
Частоту вращения магнитного поля относительно ротора, т.е. разность n 1 –n 2 , называютскольжением . Обычно скольжение выражают в долях частоты вращения поля и обозначают символомs :
s = (n 1 – n 2)/ n 1 .
Скольжение зависит от нагрузки на валу двигателя. При номинальной нагрузке его значение составляет около 0,05 у машин небольшой мощности и около 0,02 у мощных двигателей.
Из равенства, приведенного выше, легко найдем соотношение: n 2 =n 1 (1 – s ). И после простого преобразования получим выражение для частоты двигателя, удобное для дальнейших рассуждений:n 2 = 60f 1 (1 ‑ s )/p .
Поскольку при нормальном режиме работы двигателя скольжение невелико, частота вращения двигателя мало отличается от частоты вращения поля.
На практике скольжение часто выражается в процентах:
b = 100 (n 1 – n 2)/ n 1 .
У большинства асинхронных двигателей скольжение колеблется в интервале 2 –6 %.
Скольжение является одной из важнейших характеристик двигателя; через него выражаются ЭДС и ток ротора, вращающий момент, частота вращения ротора.
При неподвижном (n 2 = 0) ротореs = 1. Таким скольжением обладает двигатель в момент пуска.
Как уже было отмечено, скольжение зависит от момента нагрузки на валу двигателя; следовательно, и частота вращения ротора зависит от тормозного момента на валу. Номинальное значение частоты вращения ротора n 2,ном, соответствующее расчетному значению нагрузкиМ н, частотыf 1,ном и напряжения сетиU 1,ном, указывается на заводском щитке, крепящемся на корпусе асинхронного двигателя.

Светлана МарковаКрасота - как драгоценный камень: чем она проще, тем драгоценнее!16 мар. 2017 г. Белок является ключевым...

Гормоном, который сигнализирует головному мозгу о том, что организм нуждается в пище, является грелин: чем большее...

О пользе рыбы даже говорить не приходится, о ней уже давно все знают. Однако не все любят отварную, жареную рыбу или уху....

Как приготовить блины из патиссонов рецепты приготовления с фото - полное описание приготовления, чтобы блюдо получилось...

Хлебцы, на мой взгляд, — один из важнейших рецептов в меню сыроеда и в летний период, и зимой. Это основа, входящая в...

И я снова от души благодарю читательницу Александру, из-за комментариев которой на блоге уже появился замечательный , а...

Современный cовмещенный сонник Видеть за окном снегиря - является знаком хороших вестей, получения письма от...

По мишени: может означать фокусировку силы на определенной цели.Тщательно присмотритесь к своим жизненным...

КОНСПЕКТ УРОКА ОКРУЖАЮЩЕГО МИРА ДЛЯ 3 КЛАССА. УМК «Школа России» Тема: Воздух и его охрана. Цель...

Краткое описание карты: На рисунке мы видим, как шестеро атакуют одного, но у него есть явное преимущество: он...
Презентация «Безопасная дорога - детям» Актуальность Необходимость обучения детей ПДД, так как дети часто...

Рыбы, не сближайтесь с людьми, которые постоянно осыпают вас комплиментами — возможно, они втираются в доверие...

Отвечает Мария Бунеева, Эксперт Немецкого детского онлайн-университета В европейской католической традиции...

← 1132 - 1471 Столица Киев Язык(и) Древнерусский Религия Православное христианство Население восточные...

Гормоном, который сигнализирует головному мозгу о том, что организм нуждается в пище, является грелин: чем...

О пользе рыбы даже говорить не приходится, о ней уже давно все знают. Однако не все любят отварную, жареную...