Русские земли и княжества в XII - первой половине XIII в
← 1132 - 1471 Столица Киев Язык(и) Древнерусский Религия Православное христианство Население восточные славяне...
Условия для выбора электродвигателя
Выбор одного из каталожных типов электродвигателей считается правильным при соблюдении следующих условий:
а) наиболее полное соответствие электродвигателя рабочей машине (приводу) по механическим свойствам. Это означает, что электродвигатель должен обладать такой механической характеристикой, при котором он мог бы сообщать приводу необходимые величины скорости и ускорений как при работе, так и при пуске в ход;
б) максимальное использование мощности электродвигателя в процессе работы. Температура всех активных частей электродвигателя в наиболее тяжелых режимах работы должна максимально приближаться к обусловленной по нормам температуре нагрева, но не превосходить ее;
в) соответствие электродвигателя приводу и условиям окружающей среды по конструктивному исполнению;
г) соответствие электродвигателя параметрам питающей его сети.
Для
выбора электродвигателя необходимы
следующие исходные данные: 
а) наименование и тип механизма;
б) максимальная мощность на приводном валу механизма, если режим работы продолжительный и нагрузка постоянна, а в остальных случаях - графики изменения мощности или момента сопротивления в функции от времени;
в) скорость вращения приводного вала механизма;
г) способ сочленения механизма с валом электродвигателя (при наличии передач указываются род передачи и передаточное число);
д) величина момента при пуске, которую должен обеспечить электродвигатель на приводном валу механизма;
е) пределы регулирования скорости приводимого механизма с указанием верхнего и нижнего значений скоростей и соответствующих им величин мощности и момента;
ж) характер и качество (плавность, ступенчатость) необходимой регулировки скорости;
з) частота пусков или включений привода в течение часа; и) характеристика окружающей среды.
Выбор электродвигателя на основе учета всех условий производится по каталожным данным.
Для механизмов широкого применения выбор электродвигателя значительно упрощается за счет данных, содержащихся в соответствующих информациях заводов-изготовителей, и сводится к уточнению типа электродвигателя применительно к параметрам сети и характеру окружающей среды.
Выбор электродвигателей по мощности
Выбор
мощности электродвигателя должен
производиться в соответствии с
характером нагрузок рабочей машины.
Этот характер оценивают по двум
признакам: 
а) по номинальному режиму работы;
б) по изменениям величины потребляемой мощности.
Различают следующие режимы работы:
а) продолжительный (длительный), когда рабочий период настолько велик, что нагрев электродвигателя достигает своего установившегося значения (например у насосов, ленточных транспортеров, вентиляторов и т. п.);
б) кратковременный, когда длительность рабочего периода недостаточна для достижения электродвигателем температуры- нагрева, соответствующей данной нагрузке, а периоды остановки, наоборот, достаточны для охлаждения электродвигателя до температуры окружающей среды. В этом режиме могут работать электродвигатели самых разнообразных механизмов;
в) повторно-кратковременный - с относительной продолжительностью включения 15, 25, 40 и 60% при продолжительности одного цикла не более 10 мин (например у подъемных кранов, некоторых станков, однопостовых сварочных двигателей-генераторов и т. п.).
По изменениям величины потребляемой мощности различаются следующие случаи:
а) постоянная нагрузка, когда величина потребляемой мощности в течение работы постоянна или имеет незначительные отклонения от среднего значения, как, например, у центробежных насосов, вентиляторов, компрессоров с постоянным расходом воздуха и т. п.;
б) переменная нагрузка, когда величина потребляемой мощности периодически меняется, как, например, у экскаваторов, кранов, некоторых станков и т. п.;
в) пульсирующая нагрузка, когда величина потребляемой мощности меняется непрерывно, как, например, у поршневых насосов, щековых дробилок, грохотов и т. п.
Мощность электродвигателя должна удовлетворять трем условиям:
а)
нормального нагрева при работе; 
б) достаточной перегрузочной способности;
в) достаточного пускового момента.
Все электродвигатели подразделяются на две основные группы:
а) для длительного режима работы (без ограничения продолжительности включения);
б) для повторно-кратковременного режима с продолжительностями включения 15, 25, 40 и 60%.
Для первой группы в каталогах и паспортах указывается длительная мощность, которую электродвигатель может развивать неограниченно долго, для второй группы - мощность, которую электродвигатель может развивать, работая с перерывами сколь угодно долгое время при определенной продолжительности включения.
Правильно выбранным во всех случаях считается такой электродвигатель, который, работая с нагрузкой но графику, задан ному рабочей машиной, достигает полного допустимого нагрева всех своих частей. Выбор электродвигателей с так называемым «запасом по мощности», исходя из наибольшей возможной по графику нагрузки, ведет к недоиспользованию электродвигателя, а следовательно, к увеличению капитальных затрат и эксплуатационных расходов за счет снижения коэффициентов мощности и полезного действия.
Чрезмерное увеличение мощности электродвигателя может привести также к рывкам во время разгона.
Если электродвигатель должен работать длительно с постоянной или мало меняющейся нагрузкой, то определение мощности его не представляет затруднений и производится по формулам, обычно включающим эмпирические коэффициенты.
Значительно сложнее выбор мощности электродвигателей иных режимов работы.
Кратковременная нагрузка характеризуется тем, что периоды включения коротки, а паузы достаточны для полного охлаждения электродвигателя. При этом принимается, что нагрузка электродвигателя в периоды включения сохраняется постоянной или почти постоянной.
Для того чтобы в этом режиме электродвигатель был правильно использован по нагреву, необходимо выбрать его так, чтобы его длительная мощность (указываемая в каталогах) была меньше мощности, отвечающей кратковременной нагрузке, т. е. чтобы электродвигатель в периоды своей кратковременной работы имел тепловую перегрузку.
Если периоды работы электродвигателя значительно меньше времени, необходимого для его полного нагрева, но паузы между периодами включения существенно короче времени полного охлаждения, то имеет место повторно-кратковременная нагрузка.
Практически следует различать два вида такой работы:
а) нагрузка в период работы по величине постоянна и, следовательно, график ее изображается прямоугольниками, чередующимися с паузами;
б) нагрузка в период работы изменяется по более или менее сложному закону.
В обоих случаях задача выбора электродвигателя по мощности может быть решена как аналитически, так и графически. Оба эти способа являются достаточно сложными, поэтому практически рекомендуется упрощенный метод эквивалентных величии, включающий в себя три способа:
а) среднего квадратичного тока;
б) средней квадратичной мощности;
в) среднего квадратичного момента.
Проверка механической перегрузочной способности электродвигателя
После
выбора мощности электродвигателя
по условиям нагрева необходимо
произвести проверку механической
перегрузочной способности
электродвигателя, т. е. убедиться,
что максимальный момент нагрузки
по графику при работе и момент при
пуске не будут превышать значения
максимального момента по каталогу.

У асинхронных и синхронных электродвигателей величина допустимой механической перегрузки обуславливается их опрокидывающим электромагнитным моментом, по достижении которого эти электродвигатели останавливаются.
Кратность максимальных моментов по отношению к номинальным должна составлять 1,8 у трехфазных асинхронных электродвигателей с контактными кольцами не менее 1,65 у таких же короткозамкнутых электродвигателей. Кратность максимального момента синхронного электродвигателя должна быть также не ниже 1,65 при номинальных напряжениях, частоте и токе возбуждения, с коэффициентом мощности 0,9 (при опережающем токе).
Практически асинхронные и синхронные электродвигатели имеют механическую перегрузочную способность до 2-2,5, а у некоторых специальных электродвигателей эта величина повышается до 3-3,5.
Допустимая перегрузка электродвигателей постоянного тока определяется условиями работы и по ГОСТ составляет по моменту от 2 до 4, причем нижний предел относится к электродвигателям с параллельным, а верхний - к электродвигателям с последовательным возбуждением.
Если питающая и распределительная сети чувствительны к нагрузке, то проверка механической перегрузочной способности должна производиться с учетом потерь напряжения в сетях.
Для асинхронных короткозамкнутых и синхронных электродвигателей кратность начального момента должна быть не менее 0,9 (по отношению к номинальному).
В действительности кратность начального момента у электродвигателей с двойной беличьей клеткой и с глубоким пазом значительно выше и достигает 2-2,4.
При выборе мощности электродвигателя следует иметь в виду, что на нагрев электродвигателей оказывает влияние частота включений. Допустимая частота включений зависит от нормального скольжения, махового момента ротора и кратности пускового тока.
Асинхронные электродвигатели нормальных типов допускают без нагрузки от 400 до 1000, а электродвигатели с повышенным скольжением - от 1100 до 2700 включений в час. При пуске под нагрузкой допустимое число включений значительно сокращается.
Пусковой ток электродвигателей с короткозамкнутым ротором имеет большую величину, и это обстоятельство в условиях частых пусков, и особенно при повышенном времени разгона, имеет важное значение.
В противоположность электродвигателям с фазовым ротором, в которых часть тепла, образующегося при пуске, выделяется в реостате, т. е. вне машины, в короткозамкнутых электродвигателях все тепло выделяется в самой машине, что обуславливает ее повышенный нагрев. Поэтому выбор мощности этих электродвигателей нужно производить с учетом нагревания во время многочисленных пусков.
4-6. РАСЧЕТ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Расчет начинаем с электродвигателя постоянного тока, так как расчет его проще и понятнее, чем электродвигателей переменного тока. Здесь дано подробное объяснение всех расчетных величин, которые будут потом встречаться и в электродвигателях переменного тока. Расчет приведен для двухполюсных электродвигателей с последовательным возбуждением.
Задавшись мощностью, частотой вращения, напряжением питания двигателя, можно определить все размеры и обмоточные данные электродвигателя. Расчет электродвигателя начинается с определения двух главных размеров, которыми являются диаметр и длина якоря. Эти размеры входят в формулу:
где D — диаметр якоря, м; l — длина якоря, м; Р я — расчетная мощность, Вт; А—линейная нагрузка якоря, А/м; В — магнитная индукция в воздушном зазоре, Т; п — номинальная частота вращения, об/мин.
Длина и диаметр якоря электродвигателя выражены в метрах, так как при этом расчетные формулы, связывающие размеры двигателя с индукцией и потоком, получаются удобнее и проще. Результаты расчета, полученные в метрах, для практических целей изготовления различных деталей можно легко перевести в сантиметры или миллиметры.
Левая часть формулы пропорциональна объему якоря. Действительно, если ее умножить на π и разделить на 4, то получится объем цилиндра, каким и является якорь электродвигателя. Как видно из правой части формулы, объем якоря пропорционален мощности электродвигателя Р я и обратно пропорционален частоте вращения п. Отсюда можно сделать вывод, что чем большую частоту вращения имеет якорь электродвигателя, тем меньше будут его размеры при той же мощности. А от размеров якоря зависят размеры и остальных частей электродвигателя.
Расчетная мощность электродвигателя, Вт,
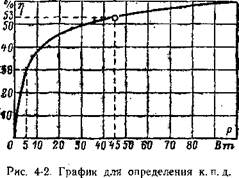
где Е— э. д. с., наводимая в обмотке якоря при вращении его в магнитном поле, В; I — ток, потребляемый электродвигателем от источника, А; Р — номинальная мощность электродвигателя, Вт; η — к. п. д. электродвигателя, значение которого можно взять по кривой рис. 4-2; как видно из кривой, значения к. п. д. снижаются при уменьшении мощности электродвигателя.
Численное значение расчетной мощности получаем, решая (4-2), где значения всех величин известны. Расчетная мощность всегда больше номинальной мощности электродвигателя, так как часть подведенной энергии теряется в самом электродвигателе.
Ток, потребляемый электродвигателем, А,
где Р — номинальная мощность, Вт; U — номинальное нанряжение, В; η — к. п. д. по кривой рис. 4-2.
Теперь можно определить и э. д. с. Е, которая будет нужна в дальнейшем:
где N — число проводников обмотки якоря; множитель 2 в знаменателе показывает, что общий ток якоря I от коллекторной пластины разветвляется между двумя проводниками обмотки и через каждый проводник проходит только половина тока; произведение πD выражает длину окружности якоря.
Таким образом, линейная нагрузка показывает, сколько ампер приходится на 1 м длины окружности якоря. Линейную нагрузку А и магнитную индукцию в воздушном зазоре В называют электромагнитными нагрузками. Они показывают, насколько сильно нагружен электродвигатель в электрическом и магнитном отношениях. Из (4-1) видно, что чем больше произведение АВ, тем меньше будут размеры якоря. Но значения А и В не должны превосходить определенного предела, так как иначе электродвигатель будет сильно нагреваться при работе.
Однако нагрев электродвигателя зависит не только от электромагнитных нагрузок, но и от времени его работы. Некоторые электродвигатели работают длительное время без остановки, например электродвигатели вентиляторов. Другие электродвигатели работают с перерывами, во время которых они успевают остыть, например электродвигатели моделей подъемных кранов, электропроигрывателей, пылесосов. Работа электродвигателей с перерывами называется повторно-кратковременной. Это значит, что электродвигатель включается на короткое время, затем происходит перерыв и электродвигатель снова включается.
Продолжительность включения такого электродвигателя выражается в процентах от определенного периода, который принимают за 10 мин. Например, если электродвигатель работает за один период 2,5 мин, а остальное время стоит, то продолжительность включения равна 25%. Если электродвигатель работает 4 мин, то продолжительность включения 40%.
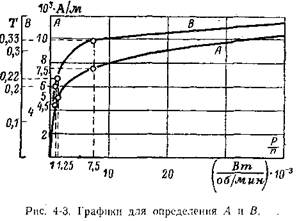
Выбор линейной нагрузки и магнитной индукции производится по кривым рис. 4-3, где по горизонтальной оси отложены отношение номинальной мощности к номинальной частоте вращения. На рис. 4-3 даны значения А и В для электродвигателей с длительным режимом работы. Например, если электродвигатель мощностью 80 Вт при частоте вращения 4000 об/мин длительно работает с полной нагрузкой, то отложим на горизонтальной оси значение 80/4 000=20 10 -3 . На вертикальной линии отсчитываем значение линейной нагрузки А =9 000 А/м и индукции в воздушном зазоре В = 0,35 Т.
При повторно-кратковременном режиме работы с продолжительностью включения 25% можно значения электромагнитных нагрузок увеличить на 30%, т. е. взять их в 1,3 раза больше. Тогда
А = 9000 1,3= 11 700 А/м,
а магнитная индукция
В = 0,35 1,3 = 0,455 Т.
Обозначим l/D=e. Значение е для малых электродвигателей находится в пределах от 0,4 до 1,6. Если надо получить электродвигатель с меньшей длиной, но с большим диаметром, то берем е=0,4. Наоборот, если электродвигатель должен помеситься в трубу небольшого диаметра, то выбираем е=1,6. Если размеры электродвигателя не связаны какими-либо условиями, то обычно берут е=1. Вводя отношение l/D = e в левую часть (4-1), освобождаемся от одного неизвестного l и (4-1) имеет вид:
Определив D, находим l=De. Таким образом определены главные размеры электродвигателя.
Теперь перейдем к расчету обмотки якоря. Для этого надо определить магнитный поток электродвигателя.
Если магнитную индукцию в воздушном зазоре умножить на площадь, через которую силовые линии входят в якорь, то получим магнитный поток электродвигателя, который обозначим греческой буквой Ф (фи):
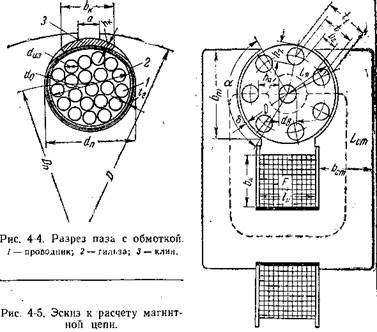
Магнитный поток измеряется в веберах. Греческой буквой τ (тау) обозначено полюсное деление, т. е. часть окружности якоря, приходящаяся на один полюс. В двухполюсном электродвигателе полюсное деление τ=πD/2. Греческой буквой а (альфа) обозначено, какую часть полюсного деления занимает дуга полюса b т (рис. 4-5). Обычно принимают а = 0,65. Таким образом, произведение аτl дает площадь полюса, обращенную в сторону якоря.
Число пазов якоря определяют из соотношения Z≈3D, в котором диаметр якоря выражен в сантиметрах. Рекомендуется брать ближайшее к полученному нечетное число. Число проводников якоря определяется по формуле
Число проводников в одном пазу N z =N/Z. Полученное при расчете число N z надо округлить до ближайшего к нему целого четного числа, чтобы можно было наматывать обмотку в два слоя. Выбор числа пазов и числа проводников будет ясен из числового примера расчета электродвигателя.
Сечение провода для обмотки якоря можно определить, разделив ток в проводнике на плотность тока. Плотность тока показывает, сколько ампер проходит через каждый квадратный миллиметр сечения провода, и обозначается греческой буквой А (дельта). Таким образом, сечение провода, мм 2 ,
Плотность тока для самодельных электродвигателей постоянного тока следует выбирать в пределах от 6 до 12 А/мм 2 . У маленьких двигателей с большой частотой вращения плотность тока берется ближе к верхнему рекомендованному значению. У более крупных двигателей с меньшей частотой вращения — ближе к нижнему значению.
Это сечение провода s является предварительным. Во втором столбце табл. 4-1 нужно найти сечение стандартного провода, которое наиболее близко подходит к вычисленному. В первом столбце этой таблицы найдем диаметр провода d. Отсутствие провода требуемого диаметра не может помешать изготовлению электродвигателя, так как имеются большие возможности для замены провода. Прежде всего один провод можно заменить двумя проводами, если сечение этих проводов будет такое же, как у заменяемого провода. Сечение провода зависит от квадрата его диаметра, значит, у провода сечением в 2 раза меньше диаметр будет в √2 раза меньше. Например, вместо провода диаметром 0,29 мм можно взять два провода диаметром 0,2 мм. При этом плотность тока почти не изменится, но число проводов в пазу возрастет в 2 раза. Плотность заполнения паза проводами также возрастет, так как каждый провод имеет двухслойную изоляцию. Наматывать такую обмотку будет труднее. Можно один провод заменить двумя с разными диаметрами. Например, вместо провода диаметром 0,29 мм можно взять два провода: один диаметром 0,31 мм, а другой диаметром 0,27 мм. Как видно из табл. 4 1, сумма сечений двух заменяющих проводов равна сечению заменяемого провода:
0,075 + 0,057=0,132 мм 2 .
Выбрав окончательно диаметр провода d, надо по табл. 4-2 определить диаметр изолированного провода d из, прибавив двустороннюю толщину δ из изоляции:
Определим размеры паза. Сечение паза S, мм 2 , необходимое для размещения проводников обмотки, можно вычислить по формуле:
где k з —коэффициент заполнения паза, показывающий, насколько плотно проводники заполняют паз.
Чем меньше коэффициент заполнения, тем больше должна быть площадь паза. Чем больше взят коэффициент заполнения и чем толще изоляция паза, тем труднее наматывать обмотку. В самодельных электродвигателях рекомендуется изолировать паз ной гильзой 2 из электрокартона толщиной 0,2 мм. Сверху обмотки в паз устанавливают клин 3 из картона толщиной 0,3 мм (рис. 4-4). В расчетах можно брать коэффициент заполнения k 3 =0,4.
В электродвигателях заводского изготовления пазы имеют сложную грушевидную форму (см. рис. 2-10), чтобы в них можно было разместить больше проводников, не ослабляя толщины зубцов между пазами. В самодельных электродвигателях легче всего просверлить круглые пазы в спрессованном сердечнике якоря (рис. 4-5).
Диаметр паза определится по его сечению:
Расстояние между центрами соседних пазов, мм,
а толщина зубца, мм,
Толщина зубца в узком месте должна быть не менее 2 мм. Если по расчету толщина зубца получается меньше 2 мм, надо увеличить диаметр якоря. Прорезь паза а должна быть на 1 мм больше диаметра изолированного провода.
Число коллекторных пластин в электродвигателях на низкое напряжение (12 В и ниже) берется равным числу пазов якоря. Укладка обмотки якоря в пазы и соединение их с коллекторными пластинами описаны в гл. 5. Сечение угольно-графитовой щетки S щ, см 2 , выбирается по формуле:
где? щ — плотность тока под щеткой, ? щ =5÷8 А/см 2 .
На этом расчет якоря заканчивается.
Переходим к расчету магнитной системы и обмотки возбуждения. Для самодельного электродвигателя проще всего применить магнитную систему открытого типа (рис. 4-5). При расчете прежде всего определяют воздушный зазор δ между якорем и полюсами. В машинах постоянного тока величина воздушного зазора определяется по формуле
Угол полюсной дуги можно найти по значению а = 0,65. Половина окружности занимает 180°; следовательно, а=180° 0,65= 117°, округляем до 120°.
Размеры магнитопровода рассчитывают по рекомендованным магнитным индукциям на его участках. При расчете сечения полюсов и станины магнитный поток увеличивают на 10%, так как часть линий замыкается между сторонами станины, минуя якорь. Поэтому магнитный поток полюсов и станины Ф ст =1,1 Ф.
Индукцию в станине принимают B ст =0,5 Т. Длину силовой линии в станине L ст определяют по эскизу (рис. 4-5). Здесь пунктирной линией показан путь магнитного потока. Он состоит из следующих участков: два воздушных зазора, два зубца, якорь и станина. Чтобы узнать, какую н. с. должна создать катушка возбуждения, надо рассчитать н. с. (Iw) для каждого из этих участков и затем все их сложить. Начнем расчет н. с. с воздушного зазора.
Намагничивающая сила двух воздушных зазоров:
где δ — воздушный зазор с одной стороны якоря, м; k δ —коэффициент воздушного зазора, учитывающий, насколько увеличивается магнитное сопротивление воздушного зазора вследствие наличия на якоре прорезей пазов; можно считать k δ =1,1; В — индукция в воздушном зазоре, Т.
Для определения н. с. зубцов якоря надо знать индукцию в зубце. Толщина зубца определяется по (4-12). Магнитный поток входит в зубец через часть окружности якоря, которую занимают одна коронка зубца и одна прорезь паза. Она называется зубцовым делением t 1 и и определяется по формуле
Индукция в зубце будет во столько раз больше индукции в воздушном зазоре, во сколько раз толщина зубца меньше зубцового деления. Кроме того, надо учесть, что часть длины якоря занята изоляционными прослойками между листами стали якоря, которые составляют около 10%. Поэтому индукцию в зубце можно определить по формуле
Этой индукции по табл. 4-3 соответствует напряженность поля Н z . Для расчета н. с. на две высоты зубца надо Н z умножить на двойную высоту зубца. Однако, учитывая, что при круглых пазах индукция в верхней и нижней частях зубца снижается, умножим Н z на высоту одного зубца lw z =H z h z .
При расчете индукции в сердечнике якоря следует учесть, что магнитный поток в нем разветвляется, и поэтому на одно сечение приходится только половина потока. Сечение сердечника якоря по рис. 4-5 равно расстоянию от основания паза до вала, умноженному на длину якоря l:
Надо учесть также изоляционные прослойки между листами. Таким образом, индукция в сердечнике якоря
Этой индукции по табл. 4-3 соответствует Н я. Намагничивающая сила сердечника якоря:
где L я — длина силовой линии в сердечнике, м, согласно рис. 4-5:
Как видно на рис. 4-5, у этого электродвигателя нет выступающих полюсов, так как они слились со станиной. Поэтому расчет неподвижной части магнитопровода сводится к расчету станины. Ширина станины определяется по заданной индукции B=0,5 Т, м,
Напряженность поля Н ст для индукции 0,5 Т находим в табл. 4-3. При определении длины силовой линии в станине мы встречаемся с затруднением, так как длина боковой стороны станины зависит от толщины катушки, а ее мы еще не знаем. Поэтому возьмем толщину катушки b к =30 δ, где δ — воздушный зазор. Зависимость между толщиной катушки и зазором объясняется тем, что от величины зазора главным образом зависит н. с. катушки, а следовательно, и размеры катушки. Определив по эскизу длину силовой линии в станине L ст, можно рассчитать н. с. станины:
Теперь сложим н. с. всех участков:
Такую н. с. должна создать катушка при холостом ходе электродвигателя. Но при нагрузке, когда ток в якоре будет расти, появится размагничивающее действие магнитного поля якоря. Поэтому н. с. катушки должна иметь некоторый запас, который подсчитывается по формуле
Таким образом, н. с. катушки при нагрузке электродвигателя
![]()
Через катушку возбуждения будет проходить ток якоря, а потому число витков катушки будет w = Iw/I.
Для определения сечения провода надо силу тока разделить на плотность тока. Она берется меньше, чем для обмотки якоря, так как витки катушки неподвижны и потому хуже охлаждаются.
Сечение провода катушки, мм 2 , s = I/?.
По табл. 4-1 находим ближайшее стандартное сечение и диаметр провода. Выбрав марку провода, по табл. 4-2 находим диаметр изолированного провода d пз. Чтобы узнать толщину катушки, надо знать площадь, мм 2 , занимаемую витками катушки, которую можно определить по формуле
Разделив площадь на длину катушки, которая на эскизе обозначена l к, получим толщину катушки, мм,
Итак, по номинальным данным электродвигателя, которые выражаются всего тремя числами, пользуясь формулами и таблицами, мы определили все размеры электродвигателя, необходимые для его изготовления. Рассчитанный электродвигатель будет надежно работать, и его нагрев не выйдет из допускаемых норм. В этом ценность расчета электродвигателя. Разве можно было бы «угадать» все эти размеры без расчетов? Вероятно, электродвигатель пришлось бы несколько раз переделывать, чтобы получить удовлетворительный результат, потратив на эти переделки в несколько раз больше времени, чем на расчет, не говоря уже об испорченных материалах. Кроме того, в процессе расчета вы получите навык по техническим расчетам и знания по теории электрических машин.
Н.В. Виноградов, Ю.Н. Виноградов
Как самому рассчитать и сделать электродвигатель
Москва 1974
Электродвигатель - это механизм, который служит для преобразования электрической энергии в механическую. В основе принципа работы любого электродвигателя находится закон электромагнитной индукции. Обычно электродвигатель состоит из неподвижной части (статора) и ротора (или якоря), в которых создаются неподвижные или вращающиеся магнитные поля. Электродвигатели бывают самых различных типов и модификаций, широко применяются во многих отраслях человеческой деятельности, и представляют собой один из главных компонентов в механизмах и приводах самого различного назначения. ОТ характеристик электродвигателя напрямую зависит эффективность производства.
Главными частями, из которых состоит Электродвигатели , являются статор и ротор. Ротор — та часть двигателя, которая вращается, а статор - которая остается неподвижной. Принцип работы электродвигателя заключен во взаимодействии вращающегося магнитного поля, создаваемого обмоткой статора и электрического тока, который находится в замкнутой обмотке ротора. Этот процесс инициирует вращение ротора в направлении поля.
Основные виды электродвигателей:
Если говорить о таких электродвигателях как асинхронные электродвигатели , то они относятся к виду двигателей переменного тока. Такие двигатели бывают как однофазные электродвигатели , так и двух- и трехфазные. В асинхронных электродвигателях частота переменного тока в обмотке не совпадает с частотой вращения ротора. Процесс работы асинхронного электродвигателя обеспечивается разницей во времени генерации магнитных полей статора и ротора. Вращение ротора из-за этого задерживается относительно поля статора. Купить электродвигатель асинхронного типа можно для машин, в которых не требуются особые условия работы пускового механизма.
Виды электродвигателей по степени защищенности от внешней среды:
Взрывозащищенные электродвигатели имеют прочный корпус, который если случится взрыв двигатели, предотвратит поражение всех других частей механизма и воспрепятствует возникновению пожара.
Защищенные электродвигатели при эксплуатации закрыты специальными заслонками и сетками, которые защищают механизм от попадания инородных предметов. Используются в среде, где нет повышенной влажности воздуха и примесей газов, пыли, дыма и химических веществ.
Закрытые электродвигатели имеют специальную оболочку, которая не дает проникать пыли, газам, влаге и другим веществам и элементам, которые способны причинить вред механизму двигателя. Такие электродвигатели бывают герметичными и негерметичными.
Область применения частотных преобразователей достаточно обширна. Они востребованы в станках и электроприводах промышленных механизмов, конвейерах, системах вытяжной вентиляции и так далее. Принцип работы частотника заключается в правиле вычисления угловой скорости вращения вала, которое включает в себя такой фактор как частота питающей сети. Таким образом, меняя частоту питания обмотки электродвигателя, можно регулировать скорость вращения ротора двигателя в прямой зависимости, таким образом уменьшить обороты электродвигателя или повысить их. Эти приборы имеют также название «инверторы», благодаря методу, при помощи которого решается задача одновременного регулирования частоты и напряжения на выходе преобразователя. Все частотные преобразователи в обязательном порядке маркируются табличками, ан которых указаны их характеристики:
Большинство промышленных частотных преобразователей предназначены для работы в трехфазных сетях переменного тока, однако встречаются и другие модели, например частотники для однофазных двигателей.
Жизнь современного человека тяжело представить без такого механизма как электродвигатель. Оглянитесь вокруг - они получил практически повсеместное распространение. Сегодня они используются не только во всех отраслях промышленности, но и в транспорте, предметах и устройствах, окружающих в повседневной жизни, на работе и дома. Фены, вентиляторы, швейные машины, строительные инструменты - вот далеко не полный перечень устройств, где используются электродвигатели.
Особой надежностью отличаются именно асинхронные электродвигатели, благодаря чему они находят широкое применение в приводах металлообрабатывающих, деревообрабатывающих станков и других промышленных станков, в кузнечных прессах, грузоподъёмных машинах, лифтах, ткацких, швейных и землеройных машинах, промышленных вентиляторах, компрессорах, насосах, центрифугах, бетономешалках. Крановые электродвигатели используются в капитальном, промышленном и гражданском строительстве, в горнодобывающей, металлургической отраслях, энергетике, транспорте.
Метро, трамвай, троллейбус - все эти виды транспорта обязаны своему существованию электродвигателю. Любой офис или жилой дом сегодня невозможно представить без кондиционера или системы очистки воздуха - в них тоже применяются электродвигатели. Функционирование большинства современного оборудования невозможно без электродвигателя, в связи с чем очень многое зависит от качества и надежности этого механизма. Его поломка может привести к очень печальным результатам, вплоть до остановки производства и огромным финансовым убыткам. Следовательно, приобретать электродвигатели можно только у надёжного и проверенного поставщика, который гарантирует качество продукции.
Принцип работы электродвигателя заключается в эффекте магнетизма, который позволяет эффективно преобразовывать электрическую энергию в механическую. Принцип преобразования энергии в разных типах электродвигателей одинаковый, для всех типов электродвигателей, но конструкция двигателей и способы контроля скорости вращающегося момента могут различаться. Всем со школьной скамьи известен простейший пример электродвигателя - когда рамка вращается между полюсами постоянного магнита. Разумеется, устройство электродвигателя, который применяется в промышленных механизмах или бытовых приборах намного сложнее. Давайте рассмотрим как работает асинхронный электродвигатель, который получил наибольшее распространение в промышленности.
Принцип работы асинхронного электродвигателя.
Принцип действия асинхронного двигателя, как и прочих, основан на использовании вращающегося магнитного поля. Скорость вращения магнитного поля принято называть синхронной, так как она соответствует скорости вращения магнита. При этом скорость вращения цилиндра принято называть асинхронной, то есть не совпадающей со скоростью вращения магнита. Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением. Чтобы заставить заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора обычно используется трехфазный ток.
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя, размещаются три обмотки, сети трехфазного тока расположенные одна относительно другой под углом 120°. Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя. Если обмотки соединить между собой и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся. Суммарный магнитный поток в тоже время будет менять свое направление с изменением направления тока в обмотках статора (полюсов). При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим, таким образом асинхронный электродвигатель.
Обмотки статора могут быть соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником». Если поменять местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное. Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора. Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой. Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов. Собранный сердечник статора закрепляют в стальном корпусе. В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя, подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка. В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором. Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
Условия для выбора электродвигателя
Выбор одного из каталожных типов электродвигателей считается правильным при соблюдении следующих условий:
а) наиболее полное соответствие электродвигателя рабочей машине (приводу) по механическим свойствам. Это означает, что электродвигатель должен обладать такой механической характеристикой, при котором он мог бы сообщать приводу необходимые величины скорости и ускорений как при работе, так и при пуске в ход;
б) максимальное использование мощности электродвигателя в процессе работы. Температура всех активных частей электродвигателя в наиболее тяжелых режимах работы должна максимально приближаться к обусловленной по нормам температуре нагрева, но не превосходить ее;
в) соответствие электродвигателя приводу и условиям окружающей среды по конструктивному исполнению;
г) соответствие электродвигателя параметрам питающей его сети.
Для
выбора электродвигателя необходимы
следующие исходные данные:
а) наименование и тип механизма;
б) максимальная мощность на приводном валу механизма, если режим работы продолжительный и нагрузка постоянна, а в остальных случаях - графики изменения мощности или момента сопротивления в функции от времени;
в) скорость вращения приводного вала механизма;
г) способ сочленения механизма с валом электродвигателя (при наличии передач указываются род передачи и передаточное число);
д) величина момента при пуске, которую должен обеспечить электродвигатель на приводном валу механизма;
е) пределы регулирования скорости приводимого механизма с указанием верхнего и нижнего значений скоростей и соответствующих им величин мощности и момента;
ж) характер и качество (плавность, ступенчатость) необходимой регулировки скорости;
з) частота пусков или включений привода в течение часа; и) характеристика окружающей среды.
Выбор электродвигателя на основе учета всех условий производится по каталожным данным.
Для механизмов широкого применения выбор электродвигателя значительно упрощается за счет данных, содержащихся в соответствующих информациях заводов-изготовителей, и сводится к уточнению типа электродвигателя применительно к параметрам сети и характеру окружающей среды.
Выбор электродвигателей по мощности
Выбор
мощности электродвигателя должен
производиться в соответствии с
характером нагрузок рабочей машины.
Этот характер оценивают по двум
признакам:
а) по номинальному режиму работы;
б) по изменениям величины потребляемой мощности.
Различают следующие режимы работы:
а) продолжительный (длительный), когда рабочий период настолько велик, что нагрев электродвигателя достигает своего установившегося значения (например у насосов, ленточных транспортеров, вентиляторов и т. п.);
б) кратковременный, когда длительность рабочего периода недостаточна для достижения электродвигателем температуры- нагрева, соответствующей данной нагрузке, а периоды остановки, наоборот, достаточны для охлаждения электродвигателя до температуры окружающей среды. В этом режиме могут работать электродвигатели самых разнообразных механизмов;
в) повторно-кратковременный - с относительной продолжительностью включения 15, 25, 40 и 60% при продолжительности одного цикла не более 10 мин (например у подъемных кранов, некоторых станков, однопостовых сварочных двигателей-генераторов и т. п.).
По изменениям величины потребляемой мощности различаются следующие случаи:
а) постоянная нагрузка, когда величина потребляемой мощности в течение работы постоянна или имеет незначительные отклонения от среднего значения, как, например, у центробежных насосов, вентиляторов, компрессоров с постоянным расходом воздуха и т. п.;
б) переменная нагрузка, когда величина потребляемой мощности периодически меняется, как, например, у экскаваторов, кранов, некоторых станков и т. п.;
в) пульсирующая нагрузка, когда величина потребляемой мощности меняется непрерывно, как, например, у поршневых насосов, щековых дробилок, грохотов и т. п.
Мощность электродвигателя должна удовлетворять трем условиям:
а)
нормального нагрева при работе;
б) достаточной перегрузочной способности;
в) достаточного пускового момента.
Все электродвигатели подразделяются на две основные группы:
а) для длительного режима работы (без ограничения продолжительности включения);
б) для повторно-кратковременного режима с продолжительностями включения 15, 25, 40 и 60%.
Для первой группы в каталогах и паспортах указывается длительная мощность, которую электродвигатель может развивать неограниченно долго, для второй группы - мощность, которую электродвигатель может развивать, работая с перерывами сколь угодно долгое время при определенной продолжительности включения.
Правильно выбранным во всех случаях считается такой электродвигатель, который, работая с нагрузкой но графику, задан ному рабочей машиной, достигает полного допустимого нагрева всех своих частей. Выбор электродвигателей с так называемым «запасом по мощности», исходя из наибольшей возможной по графику нагрузки, ведет к недоиспользованию электродвигателя, а следовательно, к увеличению капитальных затрат и эксплуатационных расходов за счет снижения коэффициентов мощности и полезного действия.
Чрезмерное увеличение мощности электродвигателя может привести также к рывкам во время разгона.
Если электродвигатель должен работать длительно с постоянной или мало меняющейся нагрузкой, то определение мощности его не представляет затруднений и производится по формулам, обычно включающим эмпирические коэффициенты.
Значительно сложнее выбор мощности электродвигателей иных режимов работы.
Кратковременная нагрузка характеризуется тем, что периоды включения коротки, а паузы достаточны для полного охлаждения электродвигателя. При этом принимается, что нагрузка электродвигателя в периоды включения сохраняется постоянной или почти постоянной.
Для того чтобы в этом режиме электродвигатель был правильно использован по нагреву, необходимо выбрать его так, чтобы его длительная мощность (указываемая в каталогах) была меньше мощности, отвечающей кратковременной нагрузке, т. е. чтобы электродвигатель в периоды своей кратковременной работы имел тепловую перегрузку.
Если периоды работы электродвигателя значительно меньше времени, необходимого для его полного нагрева, но паузы между периодами включения существенно короче времени полного охлаждения, то имеет место повторно-кратковременная нагрузка.
Практически следует различать два вида такой работы:
а) нагрузка в период работы по величине постоянна и, следовательно, график ее изображается прямоугольниками, чередующимися с паузами;
б) нагрузка в период работы изменяется по более или менее сложному закону.
В обоих случаях задача выбора электродвигателя по мощности может быть решена как аналитически, так и графически. Оба эти способа являются достаточно сложными, поэтому практически рекомендуется упрощенный метод эквивалентных величии, включающий в себя три способа:
а) среднего квадратичного тока;
б) средней квадратичной мощности;
в) среднего квадратичного момента.
Проверка механической перегрузочной способности электродвигателя
После
выбора мощности электродвигателя
по условиям нагрева необходимо
произвести проверку механической
перегрузочной способности
электродвигателя, т. е. убедиться,
что максимальный момент нагрузки
по графику при работе и момент при
пуске не будут превышать значения
максимального момента по каталогу.
У асинхронных и синхронных электродвигателей величина допустимой механической перегрузки обуславливается их опрокидывающим электромагнитным моментом, по достижении которого эти электродвигатели останавливаются.
Кратность максимальных моментов по отношению к номинальным должна составлять 1,8 у трехфазных асинхронных электродвигателей с контактными кольцами не менее 1,65 у таких же короткозамкнутых электродвигателей. Кратность максимального момента синхронного электродвигателя должна быть также не ниже 1,65 при номинальных напряжениях, частоте и токе возбуждения, с коэффициентом мощности 0,9 (при опережающем токе).
Практически асинхронные и синхронные электродвигатели имеют механическую перегрузочную способность до 2-2,5, а у некоторых специальных электродвигателей эта величина повышается до 3-3,5.
Допустимая перегрузка электродвигателей постоянного тока определяется условиями работы и по ГОСТ составляет по моменту от 2 до 4, причем нижний предел относится к электродвигателям с параллельным, а верхний - к электродвигателям с последовательным возбуждением.
Если питающая и распределительная сети чувствительны к нагрузке, то проверка механической перегрузочной способности должна производиться с учетом потерь напряжения в сетях.
Для асинхронных короткозамкнутых и синхронных электродвигателей кратность начального момента должна быть не менее 0,9 (по отношению к номинальному).
В действительности кратность начального момента у электродвигателей с двойной беличьей клеткой и с глубоким пазом значительно выше и достигает 2-2,4.
При выборе мощности электродвигателя следует иметь в виду, что на нагрев электродвигателей оказывает влияние частота включений. Допустимая частота включений зависит от нормального скольжения, махового момента ротора и кратности пускового тока.
Асинхронные электродвигатели нормальных типов допускают без нагрузки от 400 до 1000, а электродвигатели с повышенным скольжением - от 1100 до 2700 включений в час. При пуске под нагрузкой допустимое число включений значительно сокращается.
Пусковой ток электродвигателей с короткозамкнутым ротором имеет большую величину, и это обстоятельство в условиях частых пусков, и особенно при повышенном времени разгона, имеет важное значение.
В противоположность электродвигателям с фазовым ротором, в которых часть тепла, образующегося при пуске, выделяется в реостате, т. е. вне машины, в короткозамкнутых электродвигателях все тепло выделяется в самой машине, что обуславливает ее повышенный нагрев. Поэтому выбор мощности этих электродвигателей нужно производить с учетом нагревания во время многочисленных пусков.

← 1132 - 1471 Столица Киев Язык(и) Древнерусский Религия Православное христианство Население восточные славяне...

Если во сне Вы просыпали на пол крупу, то Вас ждут потери. Для беременной женщины такой сон может быть предупреждением о...

Суп картофельный вегетарианскийПpодукты: 700 г каpтофеля, 1,4 л воды, 40 г сливочного масла, 2 яйца, 100 г сметаны, 0,5...

Современные понятия о красоте требуют от девушек серьезных усилий для достижения идеальной фигуры. Еще недавно параметры...

Думаете над тем, что приготовить на завтрак или ужин? Обратите внимание на гречку. Эта каша сытная и очень полезная....

Приготовление индюшачьего шашлыка: Филе промойте, обсушите, нарежьте поперёк волокон крупными кусками.Луковицу очистите,...

Домашняя выпечка - это нечто особенное, что придает дому особый аромат и атмосферу. Пожалуй, нет ничего...

Меланин является природным пигментом, придающим волосам, коже и радужной оболочке глаз человека их уникальный и...

Воинские звания в Иностранном легионе. Примечание: Галон - знак отличия во французской армии надеваемый на...

Существуют интересные и необычные приметы про змей. Их стоит знать, ведь, кто знает, где можно столкнуться с...
Огромное влияние человека на природу и масштабные последствия его деятельности послужили основой для создания...

Родился 11 мая 1946 г. В 1966 г. окончил Ярославское военное училище имени А.В. Хрулева и был назначен в СибВО...

Боевой путь 42-й гвардейской Евпаторийской Краснознаменной мотострелковой дивизии История 42-й гвардейской...
Человек как продукт биологической, социальной и культурной эволюции Появление человека Научное исследование...

Если во сне Вы просыпали на пол крупу, то Вас ждут потери. Для беременной женщины такой сон может быть...

Суп картофельный вегетарианскийПpодукты: 700 г каpтофеля, 1,4 л воды, 40 г сливочного масла, 2 яйца, 100 г...